

Prosthetic hand control method based on MYO armlet
A control method and prosthetic hand technology, applied in prosthetics, medical science, etc., can solve the problems of data transmission being easily disturbed, data processing accuracy affecting real-time performance, etc., to achieve improved recognition accuracy, fast signal transmission speed, and low price Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
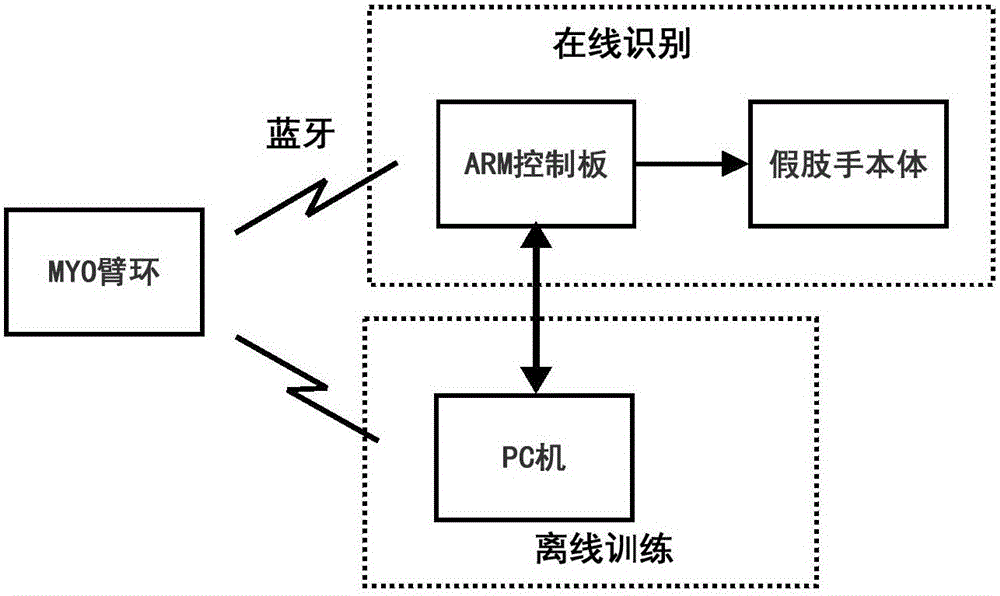
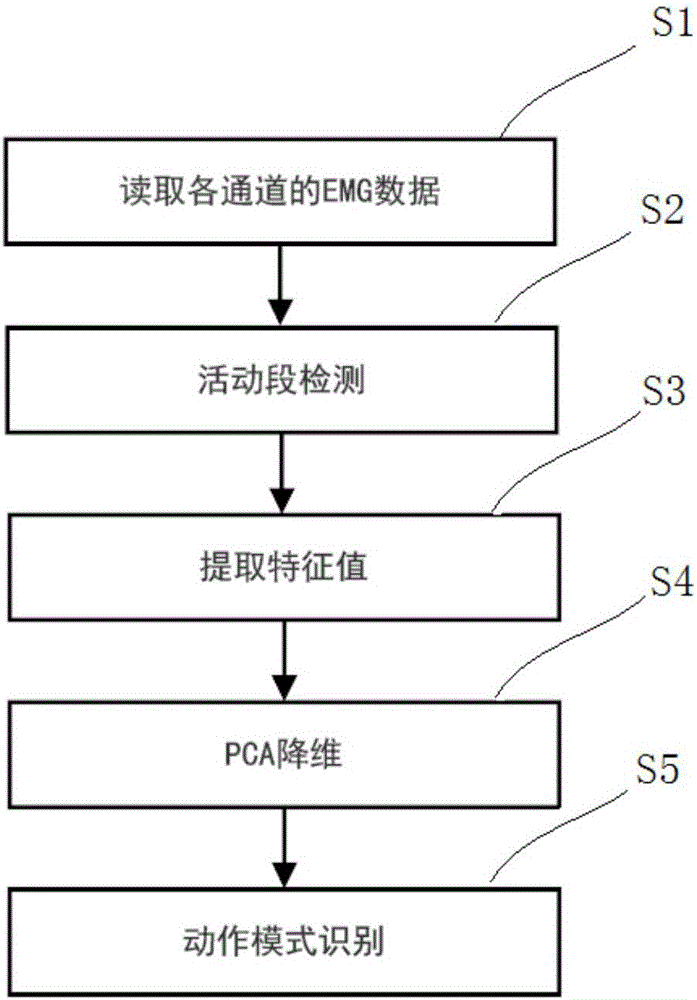
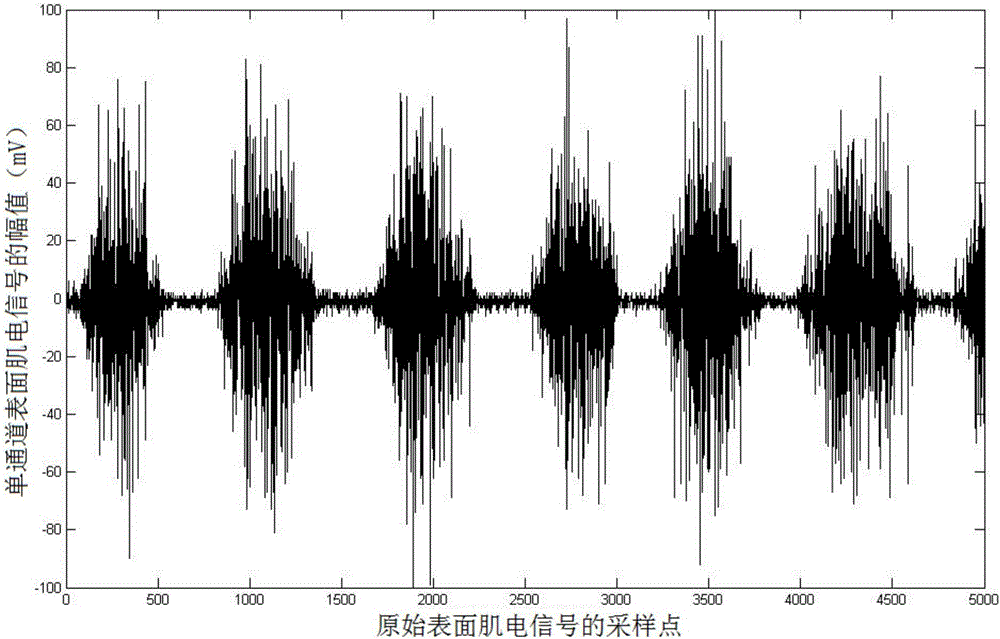
[0044] A prosthetic hand control method based on the MYO armband, which uses the MYO armband to collect the myoelectric signals of the arm muscles in real time, read the myoelectric signals and extract their eigenvalues, and use the eigenvalues and the trained neural network model online Identify the hand movement pattern, convert the movement pattern into the corresponding motor movement command, and drive the prosthetic hand to make corresponding movements. This process is online recognition;
[0045] The neural network model training method includes: performing human hand movements, using the MYO armband to collect myoelectric signals of arm muscles, reading the myoelectric signals and extracting their eigenvalues, and training hand movements according to samples of eigenvalues. Neural network model, this process is an offline process before online recognition.
[0046] The offline training process of the neural network model and the storage of the model parameters of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More