

Indoor inspection robot for transformer substation
A technology for inspection robots and substations, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high position of the equipment to be inspected, difficult to implement, and prohibitive inspection methods, and achieves stable and reliable communication and convenient installation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below in conjunction with the accompanying drawings.
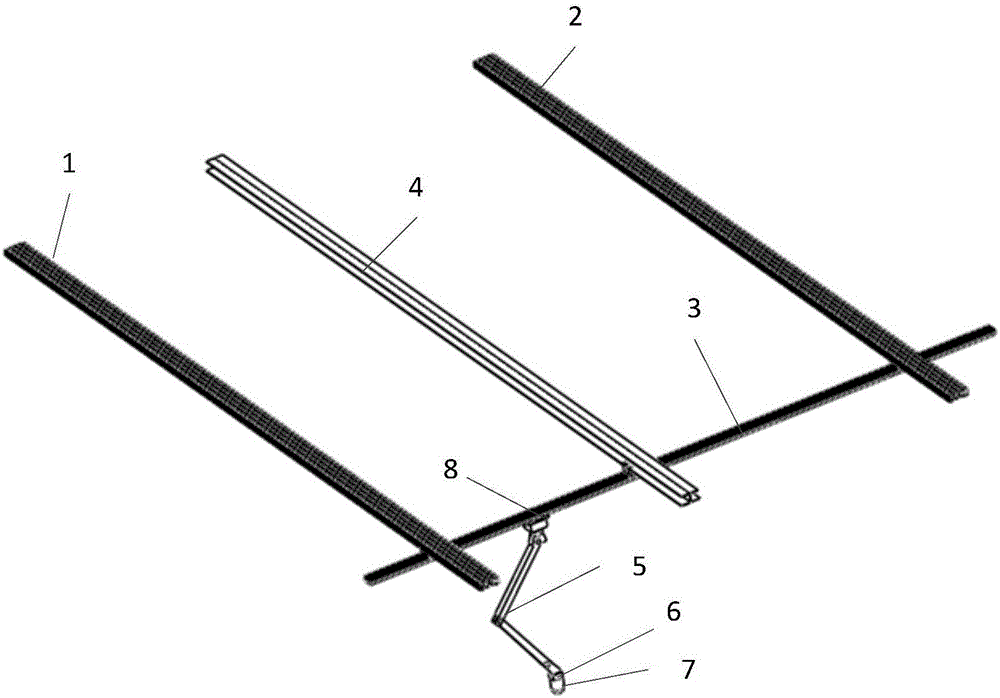
[0044] like figure 1 Described is the structural representation of the present invention. The present invention mainly comprises XY combined track, support assembly 4, mechanical arm 5, mobile platform 8, pan platform 6, detection assembly 7; Described mobile platform 8 below is installed mechanical arm 5, and mechanical arm 5 has 4 degrees of freedom, and its end A detection component 7 and a cloud platform 6 are installed.
[0045]The XY combined track includes the first X-axis 1, the second X-axis 2 and the Y-axis 3 with the same structure; the first X-axis 1 and the second line X-axis 2 are arranged in parallel, and are respectively orthogonal to the Y-axis 3; the Y-axis 3 Connect the first X-axis 1 and the second X-axis 2 at the same time, and can move linearly along the axial direction of the first X-axis 1 and the second X-axis 2; the mobile platform 8 is in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More