

A Variable-diameter Adaptive Obstacle-Climbing Robot
A robot and fuselage technology, applied in the field of variable-diameter adaptive obstacle-climbing robots, can solve problems such as inability to complete, and achieve the effects of reduced control steps, simple and compact structure, and low production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
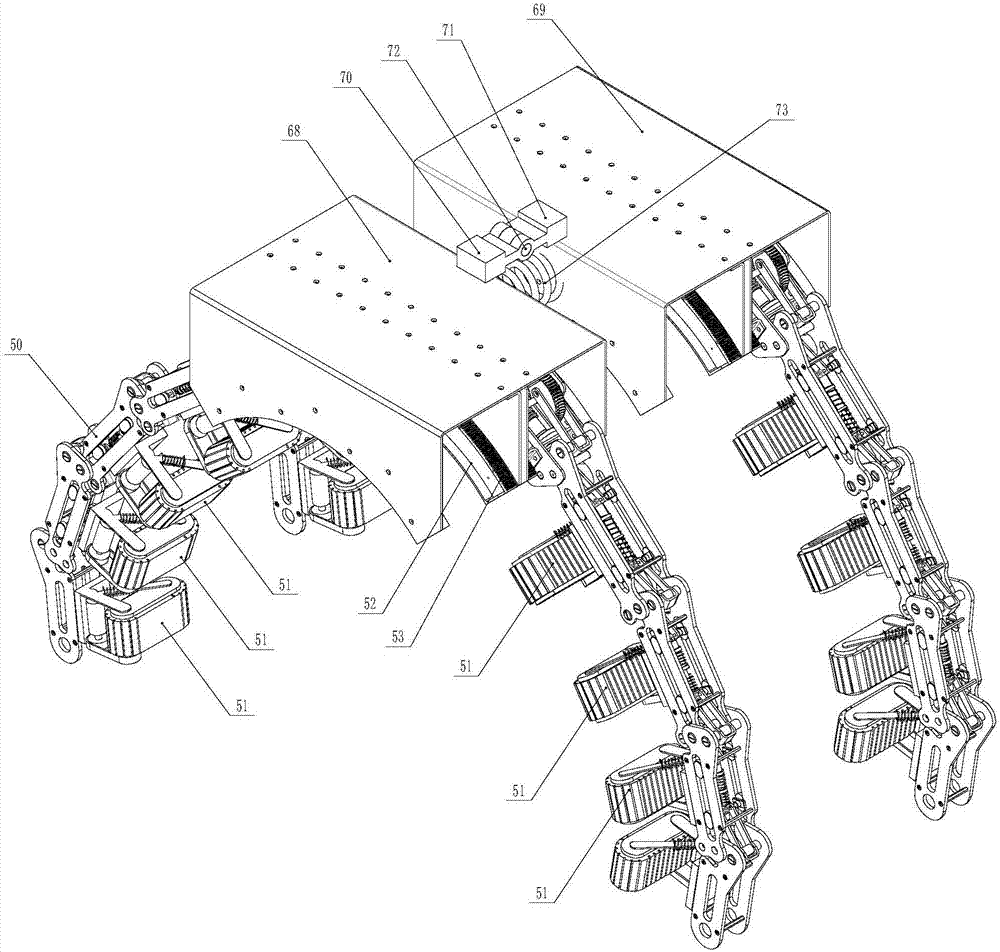
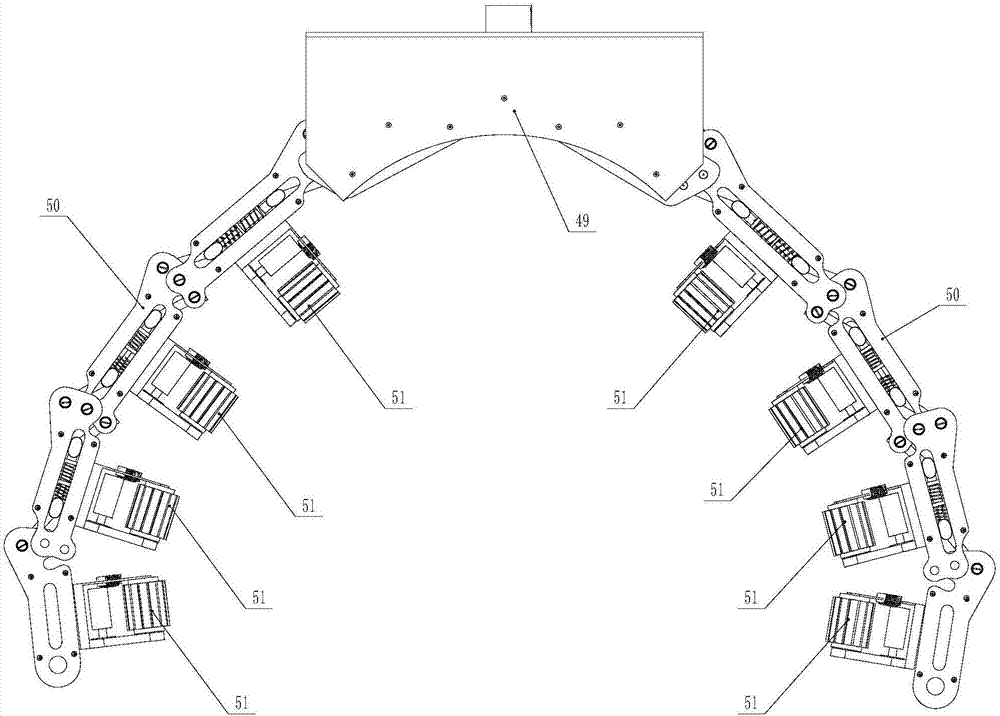
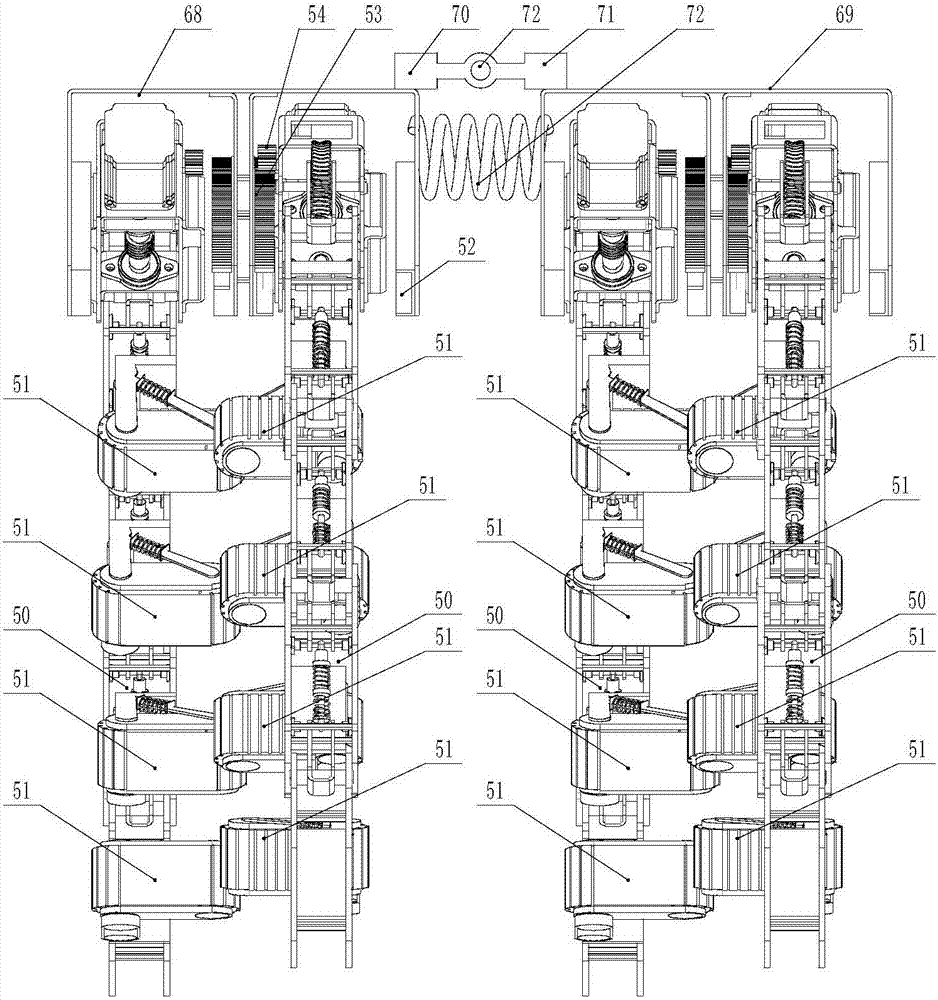
[0026] refer to Figure 1-10 As shown, a variable-diameter adaptive obstacle climbing robot includes a fuselage 49, an embracing mechanism 50 and a climbing mechanism 51, and the fuselage 49 includes a first single set of fuselages 68, a second single set of fuselages 69, The first fuselage connecting block 70, the second fuselage connecting block 71, the fuselage connecting shaft 72 and the fuselage spring 73, the first fuselage connecting block 70 is fixed on the first single fuselage 68, so The second fuselage connecting block 71 is fixed on the second single group fuselage 69, the first fuselage connecting block 70 and the second fuselage connecting block 71 are hinged by a fuselage connecting shaft 72, and the fuselage The spring 73 is located directly below the fuselage connecting shaft 72, and the two ends of the fuselage spring 73 are respectively fixed on the first single-group fuselage 68 and the second single-group fuselage 69; The fuselage 68 and the second single...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More