

Fire scene fire source positioning method and system and fire-fighting robot
A positioning method and technology of positioning system, which are applied to fire alarms, fire alarms that rely on radiation, and positioning, etc., can solve the problem of inability to accurately locate the fire source at the fire scene, and achieve simple operation and improve work efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
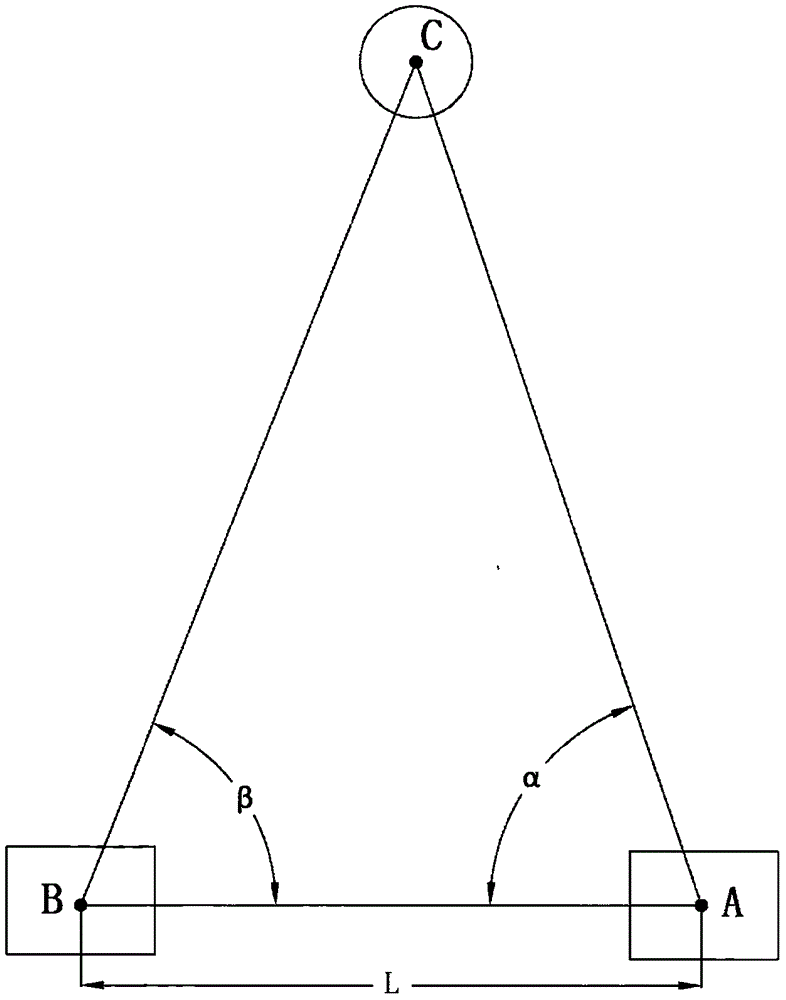
[0022] Such as figure 1 As shown, the method for locating a fire source at a fire scene in this embodiment includes the following steps:
[0023] S1. Place the thermal imager at the starting point A, and detect the direction of the fire source point C through the thermal imager;
[0024] Specifically, the thermal imager is set on the pan-tilt system, and the pan-tilt system drives the thermal imager to rotate through the pan-tilt motor to find the fire source, so that the thermal imager points to the direction of point C of the fire source.
[0025] S2. Move the thermal imager along a straight line to another point B, which is another point at any distance from point A, and detect the direction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More