

Obstacle-crossing type robot for cleaning building external wall
A building exterior wall and obstacle-surmounting technology, which is applied in the field of cleaning robots, can solve problems that affect the robot’s obstacle-surmounting function and flexibility, unfavorable cleaning of the outer wall of the cleaning robot, and reduce the robot’s ability to overcome obstacles. Obstacle-surmounting ability and flexibility, and the effect of improving obstacle-surmounting performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
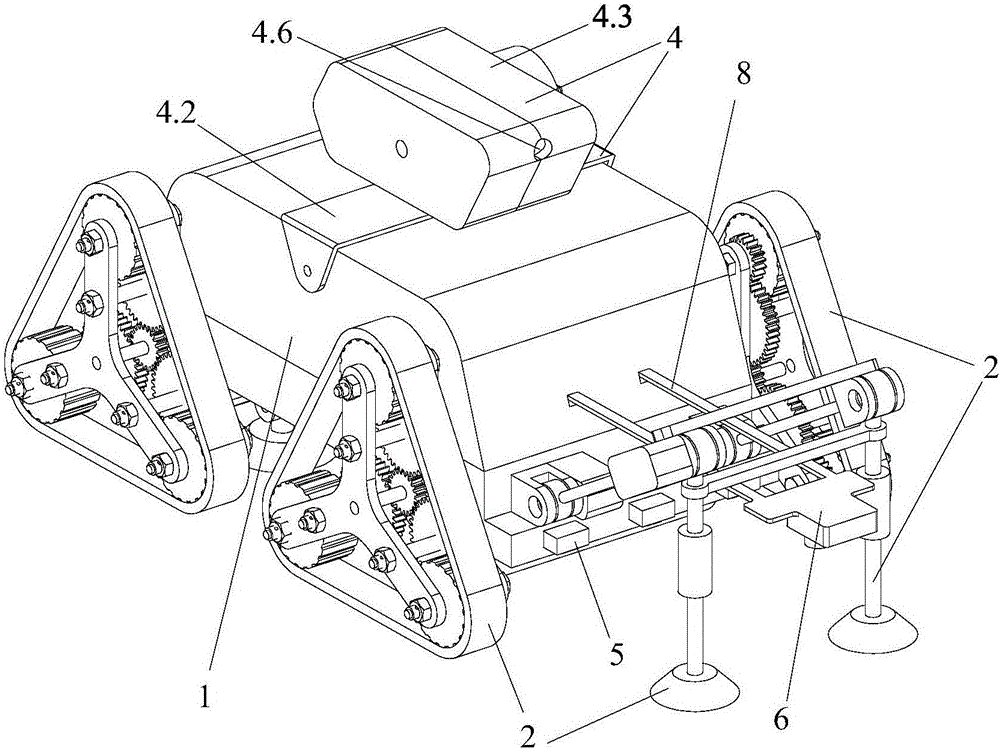
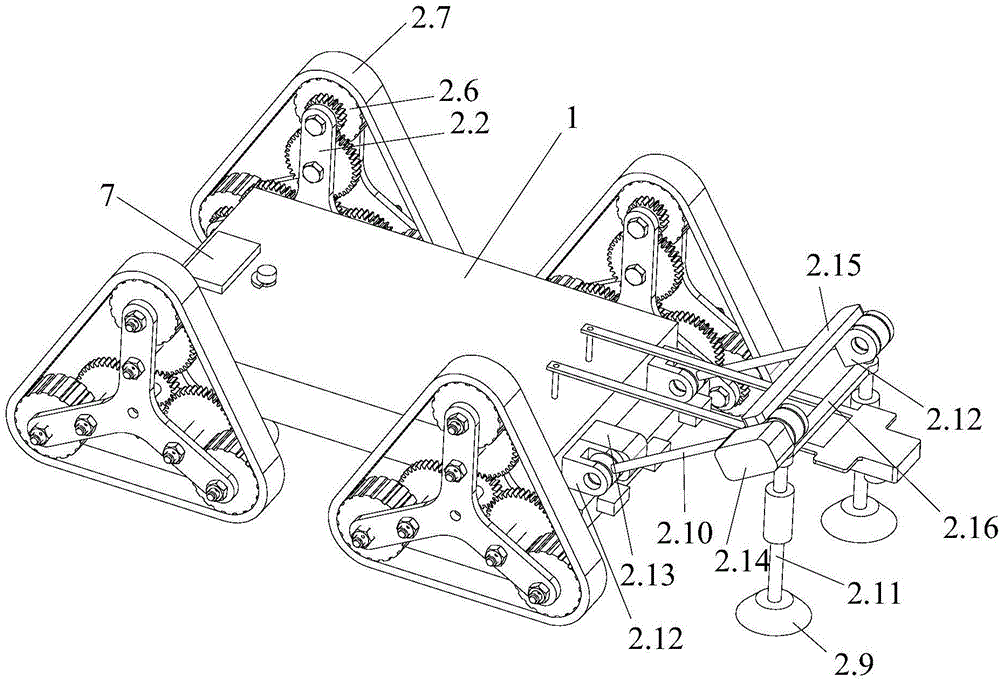
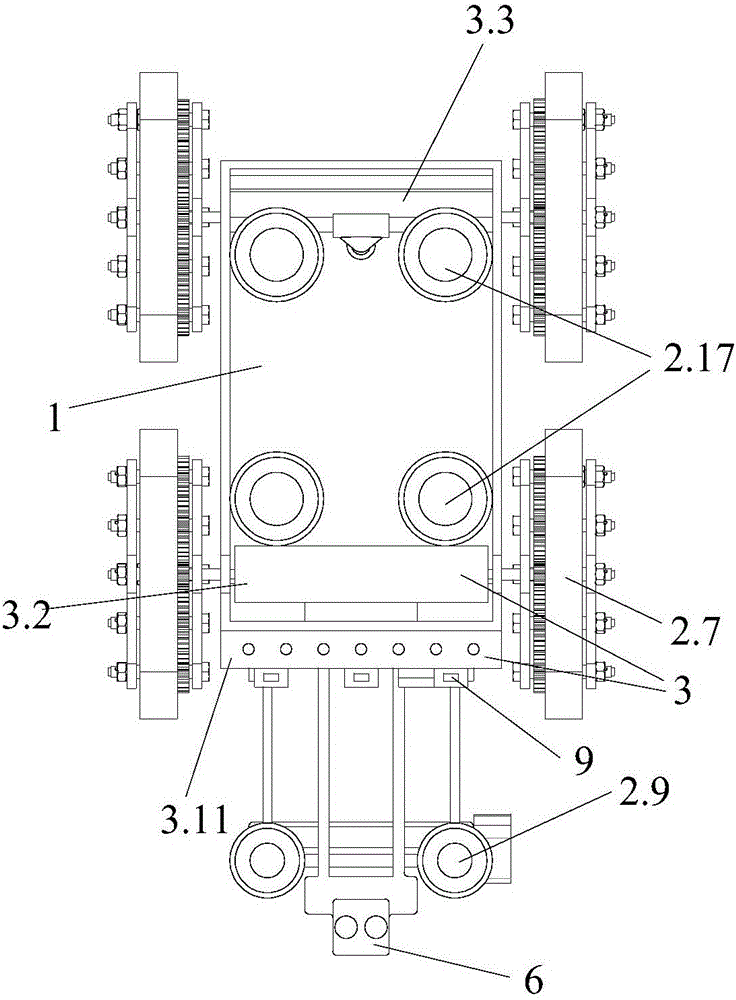
[0070] Such as Figures 1 to 15 As shown, a kind of obstacle-surmounting robot for cleaning the exterior wall of the present invention includes: robot body 1, and the obstacle-surmounting mechanism 2 and the cleaning mechanism 3 that are all installed on the robot body 1, also include the wall gray scale for detecting A gray scale sensor 5 for detecting an obstacle or a wall edge, a gyro sensor 7 for detecting whether the robot body 1 is in a horizontal state, and a signal connection with the obstacle-breaking mechanism 2 and the cleaning mechanism 3 respectively. controller. Wherein, the obstacle surmounting mechanism 2 includes four obstacle surmounting walking devices and a crawling adsorption device all arranged on the robot body 1 . Four obstacle walking devices are evenly distributed on both sides of the robot body 1, and the crawling adsorption device includes two front-end adsorption parts and four bottom adsorption parts, wherein the two front-end adsorption parts ar...
Embodiment 2
[0098] This embodiment differs from Embodiment 1 only in that: Figure 17 As shown, the protective mechanism of the present invention also includes a flange bolt 4.12 for fixing the protective shell 4.3 and restricting the movement of the protective shell 4.3 in the axial direction, a gasket 4.17 for adjusting the gap between the flange bolt 4.12 and the protective shell 4.3, And the second gasket 4.18 for reducing the friction between the protective shell 4.3 and the cage three 4.2, wherein the flange bolt 4.12 is threadedly connected with the fixing part 4.9 and compresses the protective shell 4.3, and the gasket one 4.17 is arranged on the flange bolt 4.12 and the protective shell 4.3, to prevent the gap between the two is too large to cause sloshing. The second gasket 4.18 is arranged between the protective shell 4.3 and the third cage 4.2, so as to avoid direct contact with the third cage 4.2 when the protective shell 4.3 rotates.
[0099] Other structures of this embodi...
Embodiment 3
[0101] The only difference between this embodiment and Embodiment 1 is that in this embodiment, two, six, or more than eight obstacle-surmounting walking devices can be set according to the size of the robot body, and the obstacle-surmounting walking devices are evenly distributed on both sides of the robot body . At the same time, one or more front-end adsorption parts and two or more bottom adsorption parts can also be provided according to actual needs.
[0102] Other structures of this embodiment are consistent with Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More