

A spatial multi-degree-of-freedom surgery auxiliary arm mechanism
A technology of arm mechanism and degree of freedom, applied in the direction of surgical robots, etc., can solve the problems of structural design, high cost of use, and complex structure of surgical site tissue fixation, and achieve the effect of simple structure, convenient operation, and customer service obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
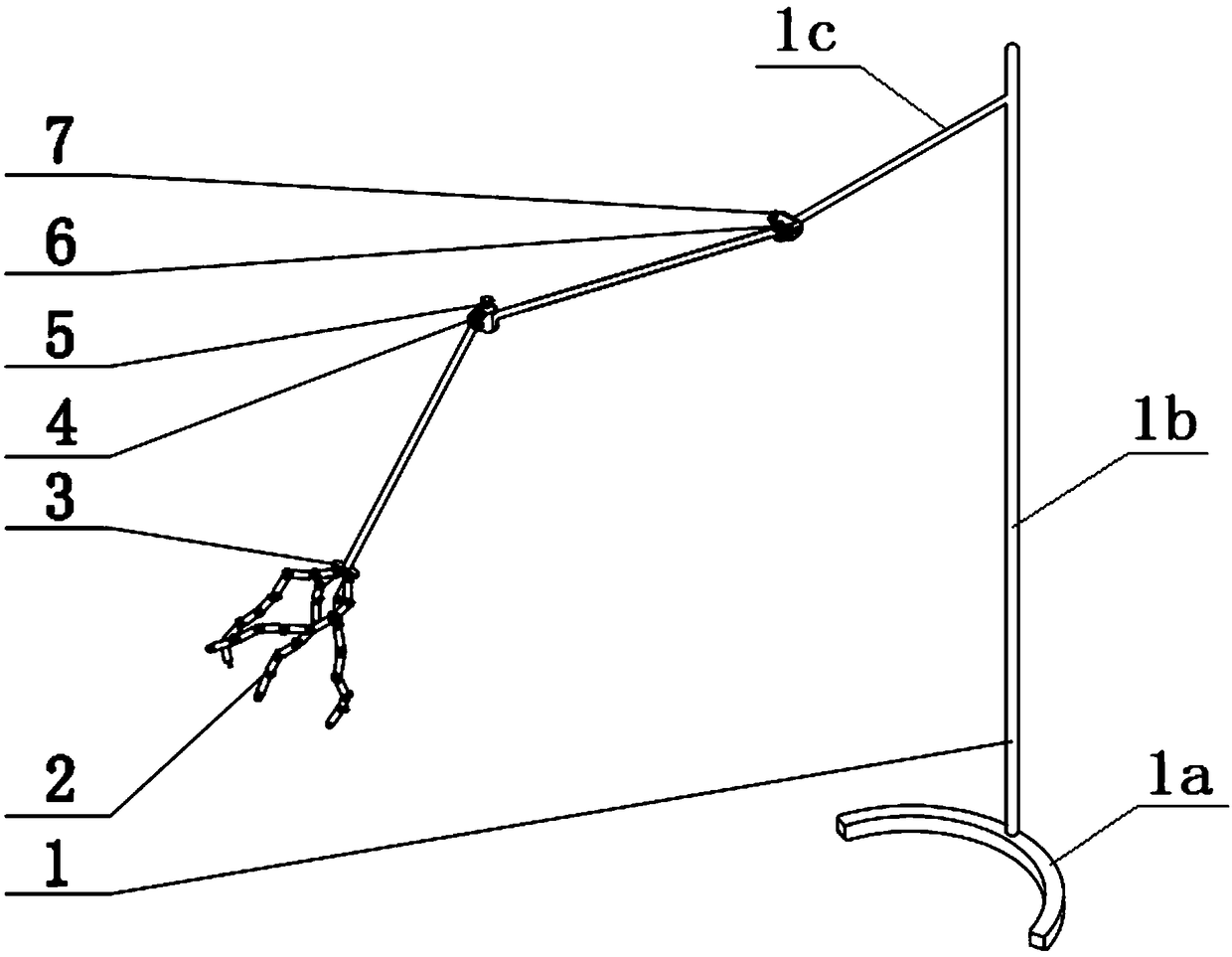
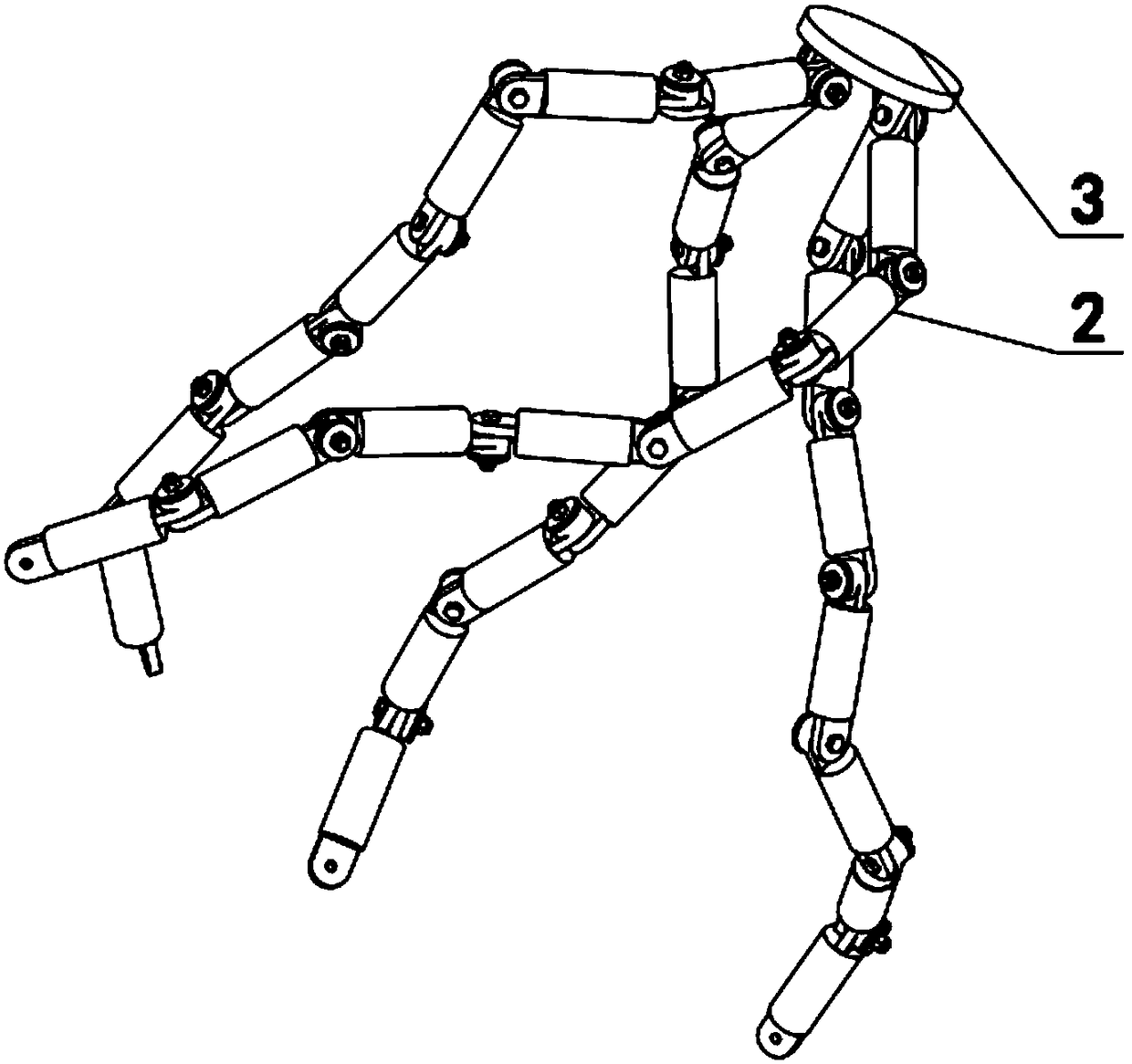
[0047] Such as figure 1 As shown, a space multi-degree-of-freedom operation auxiliary arm mechanism includes an arm support 1, a horizontal direction adjustment unit, a vertical direction adjustment unit, a tentacle mounting plate 3 adjusted by the vertical direction adjustment unit and the horizontal direction adjustment unit and installed on the Tentacle group on the bottom surface of the tentacle mounting disc 3 .
[0048] The arm support 1 generally includes a base 1a, a column 1b fixed on the base 1a, and an installation arm 1c fixed on the top of the column 1b, and the installation arm 1c is arranged obliquely.
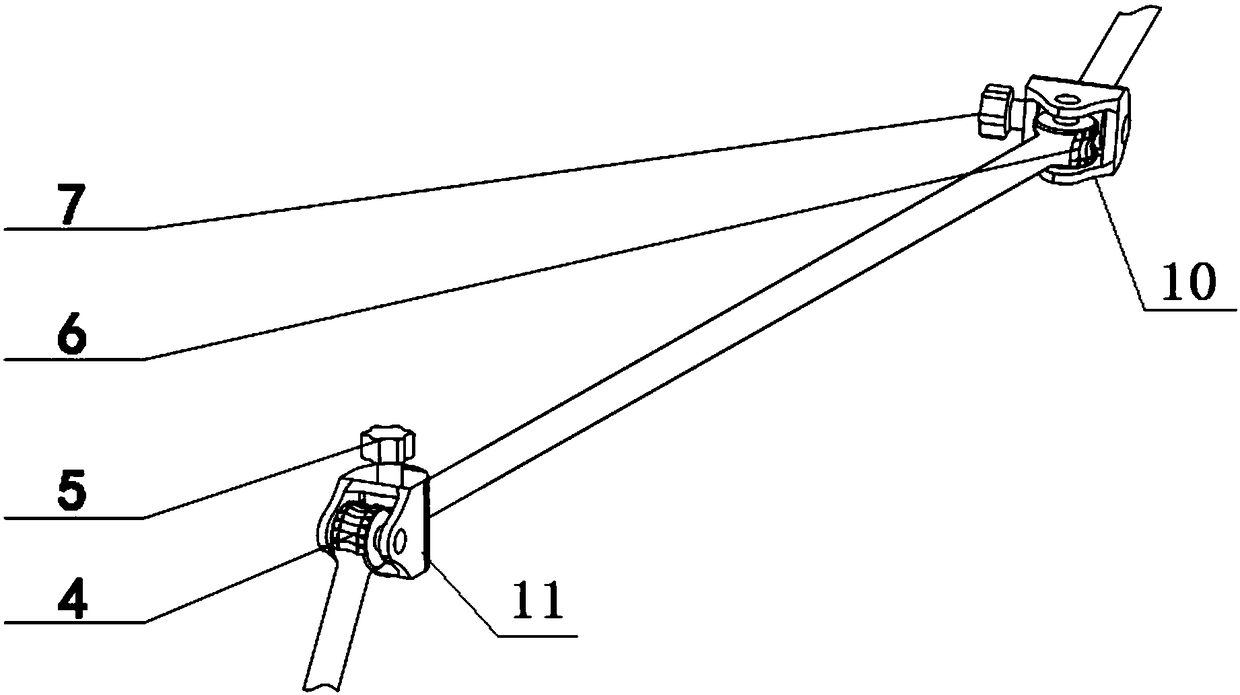
[0049] refer to figure 2 and Figure 5 , the bottom end of the mounting arm 1c inclined downward is fixed with a vertical adjustment unit. The horizontal direction adjustment unit includes a first mounting base 10 fixed to the mounting arm 1c, a first worm gear pair fixed on the first mounting base 10 and a first hand wheel 7 for adjusting the worm, the firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More