

Multi-target track-before-detect method based on probability hypothesis density filtering
A probability hypothesis density and multi-target technology, which is applied in the field of multi-target tracking before detection based on probability hypothesis density filtering, can solve the problems of large amount of calculation, poor real-time performance, missed detection or wrong detection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
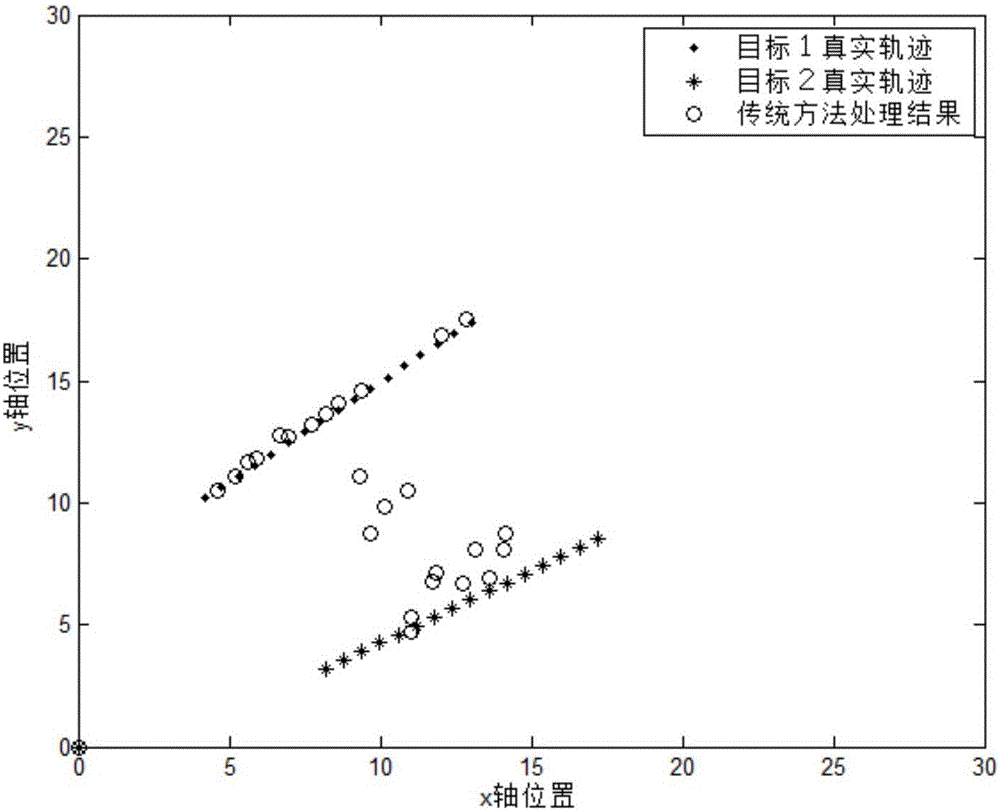
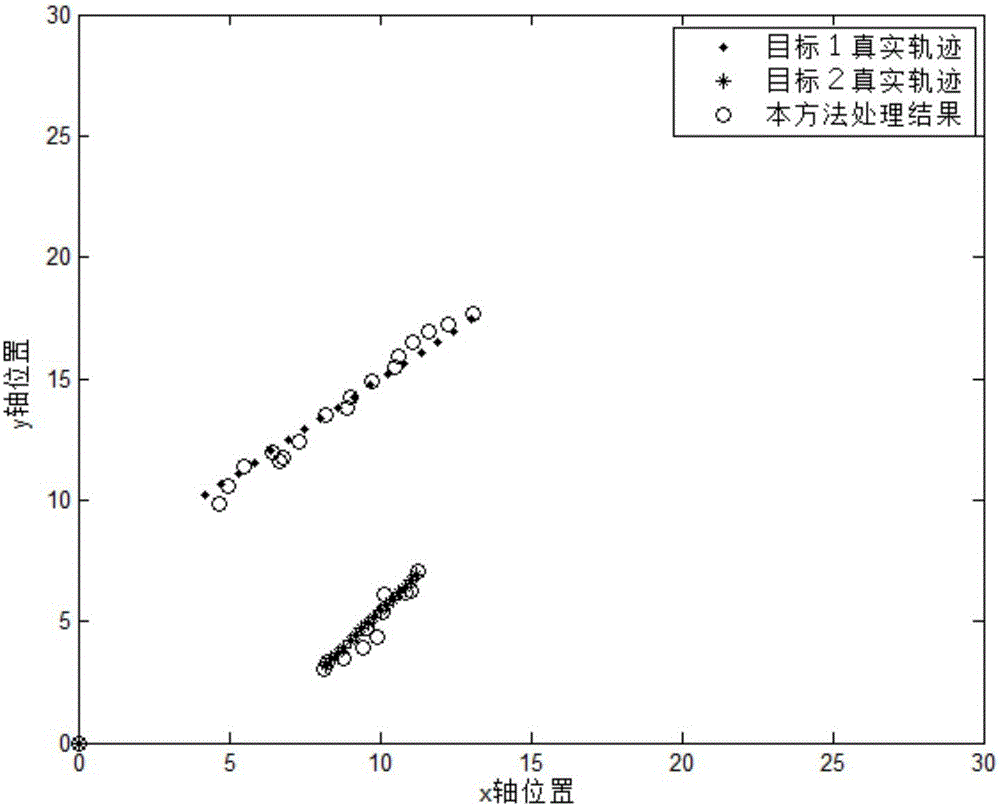
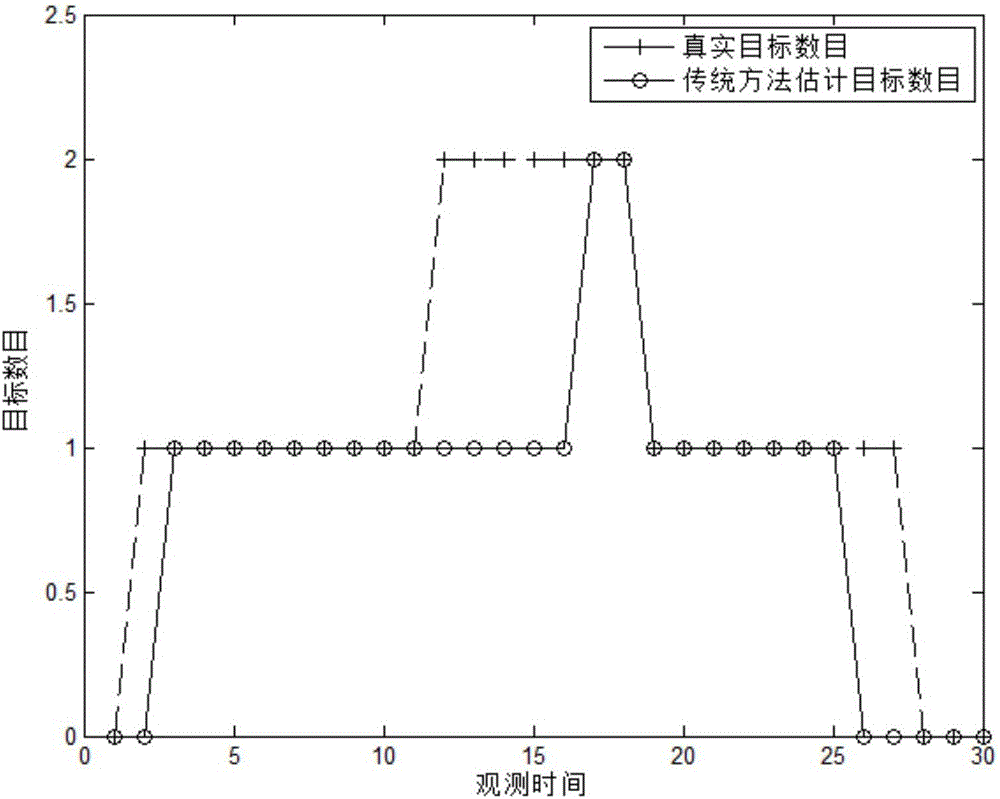
[0087] The objective equation of motion is uniform linear motion x k+1 =Fx k +v k ; v k is Gaussian white noise with zero mean, and its covariance matrix is Q. The sensor continuously observes T O The data of =30 moments, it has n * m = 35 * 35 sensing units, the length and width Δx=Δy=1 of the sensing unit block, the time interval T=1, the standard deviation σ=1 of the noise, the sensor’s Measurement error Σ = 0.7. Target 1 appears at the 2nd moment and disappears at the 18th moment; target 2 appears at the 12th moment and disappears at the 27th moment. Each target is represented by 2048 particles, and the number of new particles per moment is J=1024. The survival probability of the target is 0.95, the derived probability is 0, and the newborn probability is 0.2. Set the threshold probability p * = 0.98.
[0088] F = 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More