

Universal rehabilitation training hand device for left and right hands
A technology for rehabilitation training, left and right hands, applied in the field of medical rehabilitation training equipment, can solve the problems of inflexible use, unstable hand fixation, easy to fall off, etc., achieve the effect of comprehensive functions, flexible rehabilitation movement, and large rehabilitation torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
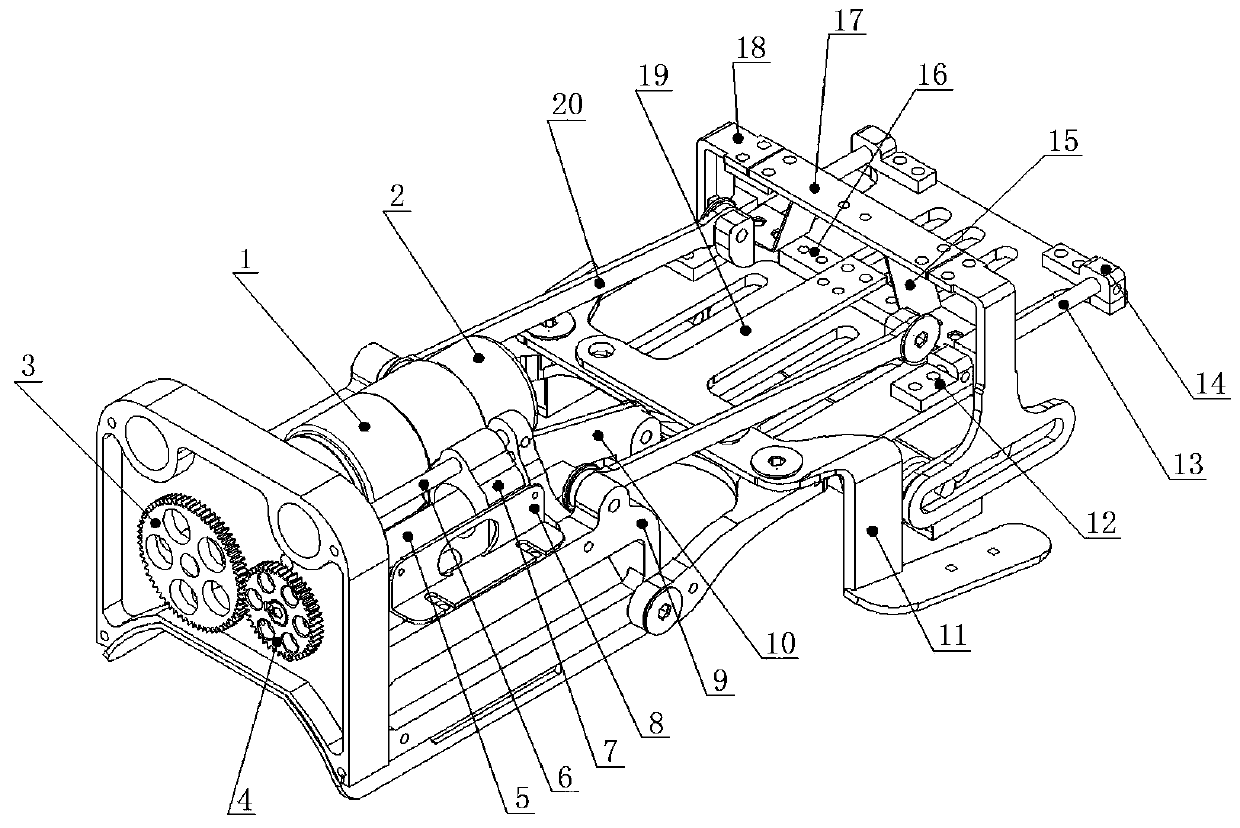
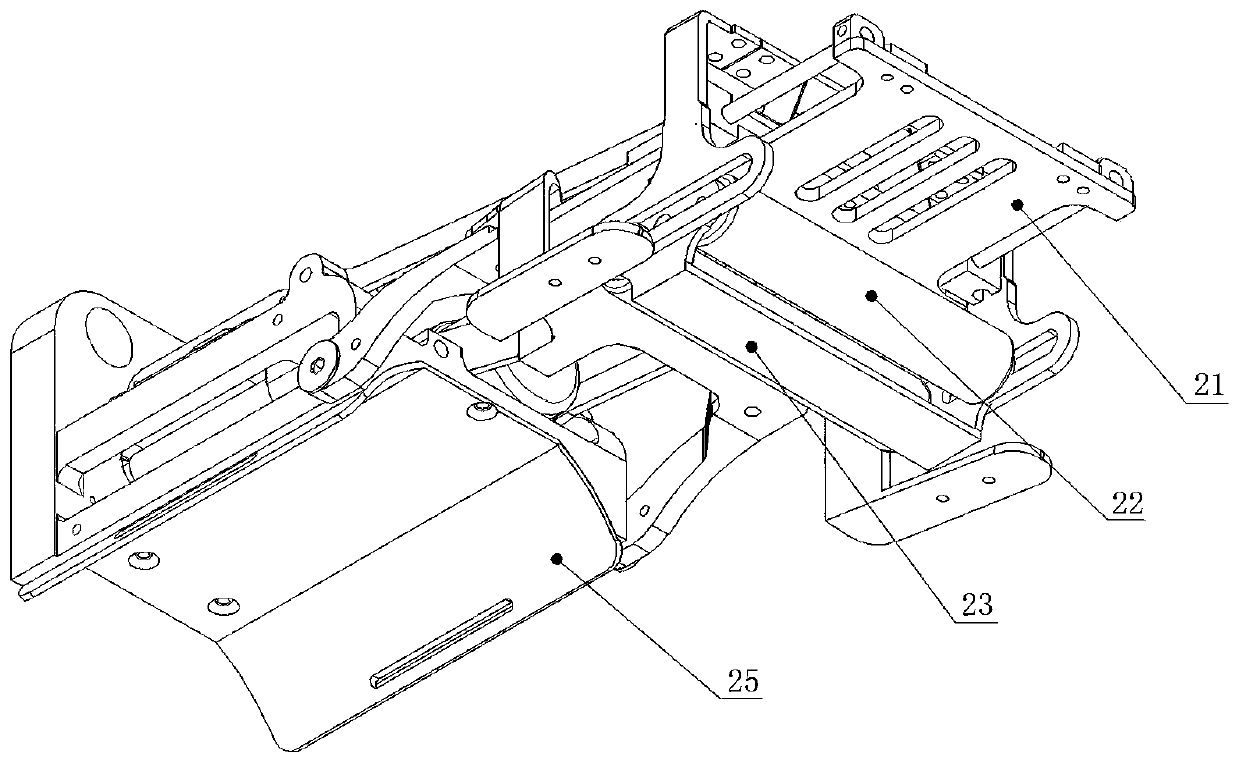
[0019] Embodiment one: if Figure 1-2 As shown, in the present embodiment, the general rehabilitation training hand device for left and right hands includes a power base 9 and a servo motor 1, wherein the servo motor 1 is arranged inside the power base 9, an encoder 2 is installed at one end of the servo motor 1, and The rear end face of the power base 9 is provided with a driving gear 3 connected to the servo motor 1, and a driven gear 4 cooperating with the driving gear 3 is provided on one side of the driving gear 3. The front end of the power base 9 is equipped with a hand rest. Plate 21, the back of the hand plate 21 is hinged with the two outer sides of the front end of the power base 9, and a screw nut pair 5 is also arranged on one side of the servo motor 1 inside the power base 9, and the transmission screw in the screw nut pair 5 Cooperate with the driven gear 4 and connect with each other. The screw nut in the screw nut pair 5 is provided with a screw nut seat 7, a...
Embodiment 2
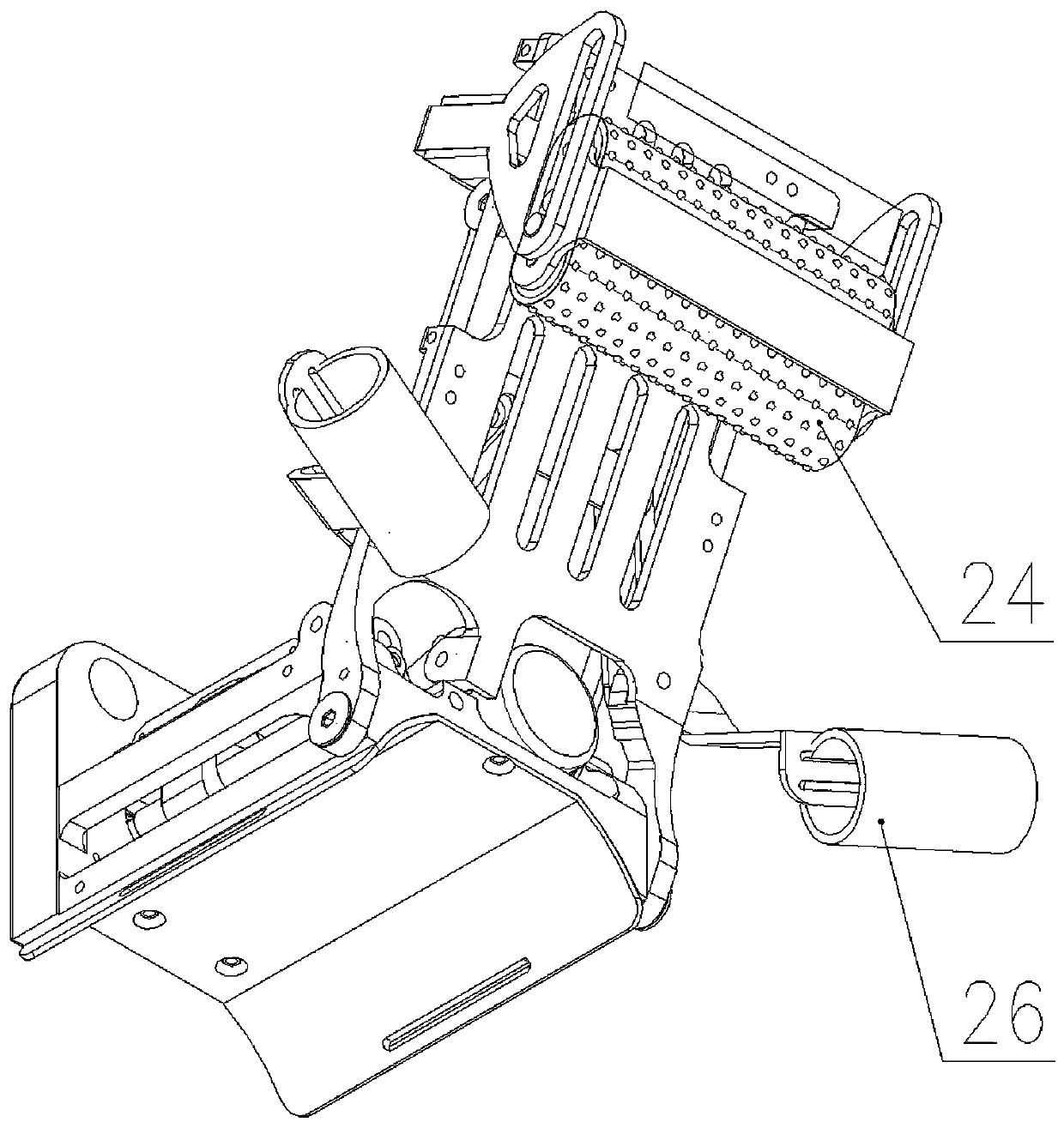
[0025] Embodiment two: if image 3 As shown, this embodiment is basically the same as Embodiment 1, the difference is that the middle of the slider 16 is fixedly connected to the vertical plate of the T-shaped connecting plate 19, and the two ends of the horizontal plate of the T-shaped connecting plate 19 are respectively connected with Thumb push rod 11, one end that thumb push rod 11 is connected with T-shaped connecting plate 19 is provided with slotted hole, and the left end of the transverse plate of T-shaped connecting plate 19 is slidably connected in the long hole of left thumb push rod 11, and T-shaped connecting plate The right end of the horizontal plate of 19 is slidably connected in the long hole of the right thumb push rod 11, and the middle parts of the left and right thumb push rods 11 are all rotatably connected on the back of the hand plate 21, and a thumb sleeve 26 is arranged at the front end of the thumb push rod 11. .
[0026]Slider 16 just drives T-sha...
Embodiment 3
[0028] Embodiment 3: This embodiment is basically the same as Embodiment 2, the difference is that the two ends of the horizontal plate of the T-shaped connecting plate 19 are respectively provided with round holes, and the round holes on the T-shaped connecting plate 19 are connected The bar is slidably connected with the long hole of the thumb push rod 11, and a round hole is arranged in the middle of the thumb push rod 11, and the round hole on the thumb push rod 11 is rotatably connected with the round hole on the back of the hand plate 21 through the connecting rod.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More