

Orthogonal two-way movement variable structure mobile robot and its control method
A mobile robot and two-way motion technology, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of difficult to accurately control the steering angle of the walking wheel frame and low transmission efficiency, and achieve the effect of enhancing the mobility and flexibility of the movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with accompanying drawing.
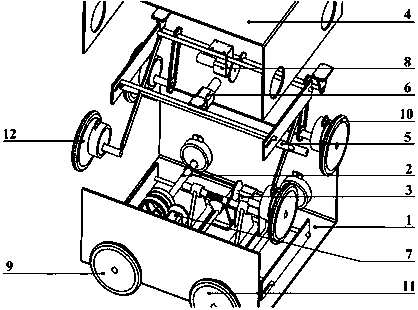
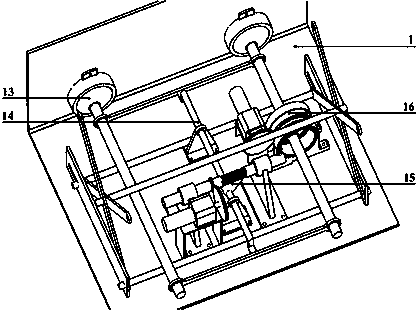
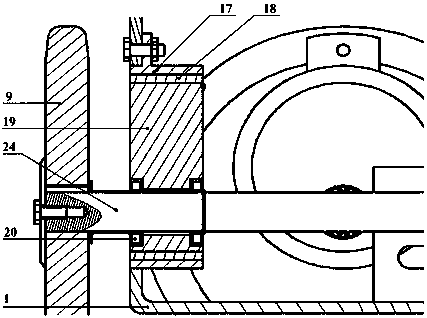
[0047] Such as figure 1 As shown, the variable structure mobile robot capable of orthogonal bidirectional movement provided by the present invention includes a chassis 1, a separate displacement drive mechanism 2, a displacement motor 3, a top cover 4, an integral displacement drive mechanism 5, and a displacement motor Push rod 6, driving wheel motor A7, driving wheel motor B8, driving wheel A9 and driving wheel B10, follower wheel A11 and follower wheel B12, control device, guide sensor. The chassis 1 and the top cover 4 are respectively a bent part with a bottom plate and two side plates. Separate displacement drive mechanism 2, driving wheel motor A7, and displacement motor 3 are installed on the chassis 1. While keeping the position of the driving wheel motor A7 unchanged, the height position of the axis of the driving wheel A9 relative to the chassis is changed by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More