

Method for resisting magnetic interference
A technology of magnetic interference and interference time, applied in the directions of measurement devices, instruments, surveying and navigation, etc., can solve the problems of inaccurate heading angle measurement, weakening heading angle measurement accuracy, and inaccurate MEMS magnetometer heading angle measurement, etc. Guarantee measurement accuracy, reduce interference, and avoid the effect of divergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
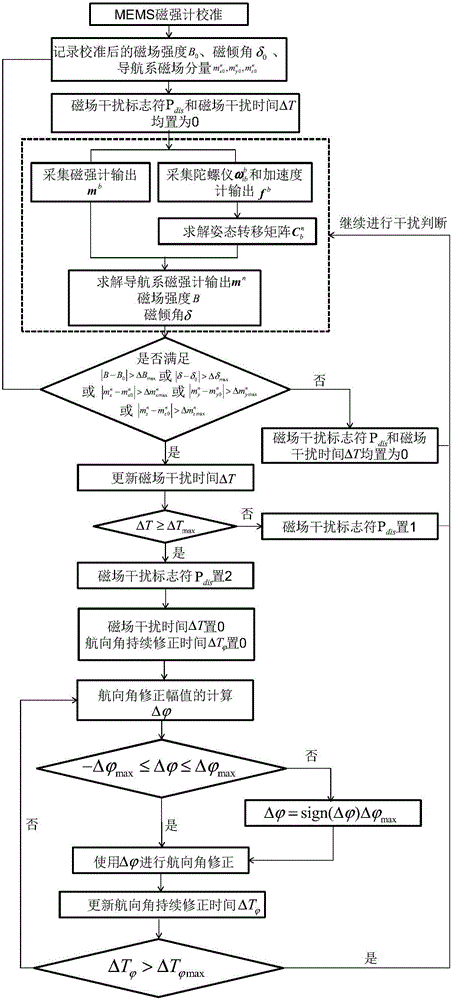
[0032] like figure 1 As shown, a specific implementation method of anti-magnetic interference:
[0033] Step 1. In the initial working stage of the MEMS attitude system, when there is no magnetic field interference, calibrate the MEMS magnetometer, and record the calibrated magnetic field strength B 0 , magnetic inclination δ 0 , and the magnetic field component of the navigation system The magnetic field interference designator P dis set to 0.
[0034] Step 2. Collect the magnetometer output of the MEMS attitude system at a certain moment Gyroscope output and accelerometer output The superscript b stands for machine system.
[0035] Step 3. Output from gyroscope and accelerometer output and the attitude transfer matrix at the previous moment Calculate the current moment attitude transition matrix where n represents the Department of Geography.
[0036] Step 4. According to the magnetometer output and the current moment attitude transfer matrix Computin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More