

Point-cloud model and CAD model registering method based on detection features
A technology for detecting features and point cloud models, applied in image data processing, instruments, calculations, etc., can solve problems such as insufficient stability, insufficient registration accuracy, and low registration efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0048] The preferred embodiments of the present invention are given below in conjunction with the accompanying drawings to describe the technical solution of the present invention in detail, but the present invention is not limited to the scope of the described embodiments.
[0049] In the present invention, the representations of points, center of gravity, normal vector, etc. that appear in the parts related to calculation and related formulas should be understood as vector representations, and calculations involving points, center of gravity, normal vector, etc. should be understood as calculations for vectors , unless explicitly stated otherwise or it is obvious that scalars are involved or computed on scalars.
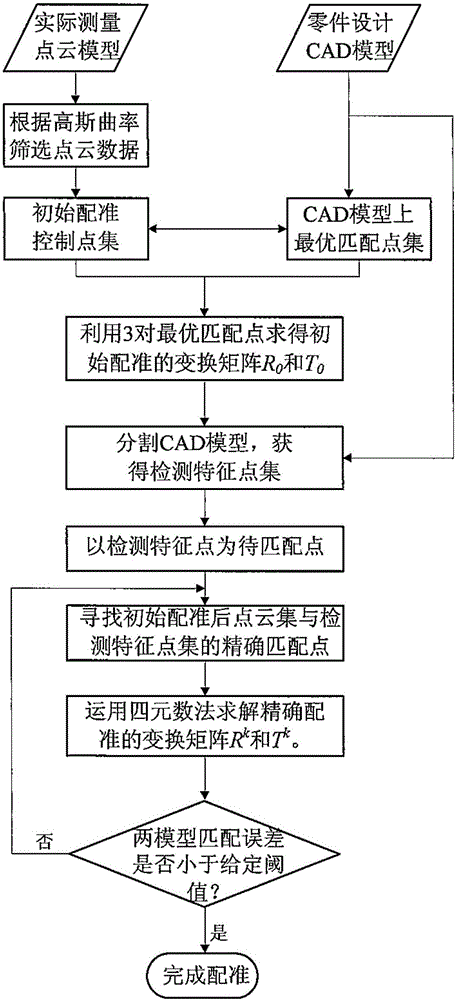
[0050] refer to figure 1 As shown, the registration method of a point cloud model based on detection features and a CAD model according to a preferred embodiment of the present invention, wherein the point cloud model involved can be a point cloud model obtained by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More