Moving object detection method of mobile camera under high parallax
A technology of moving targets and moving cameras, applied in image analysis, instruments, calculations, etc., can solve problems such as extremely high hardware requirements, poor robustness, and inapplicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
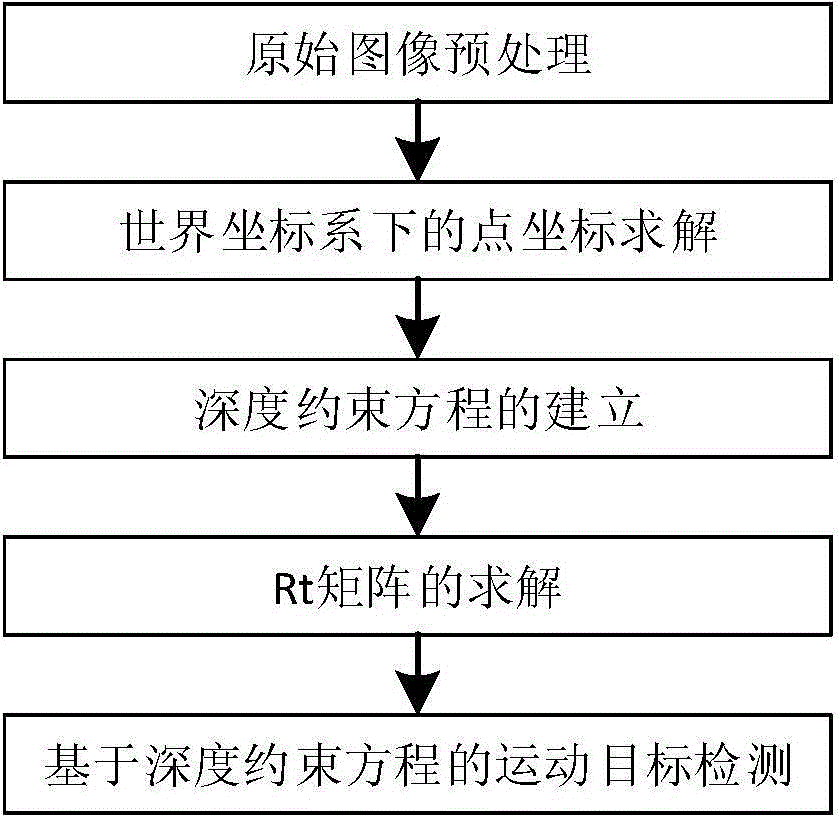
[0025] combine figure 1 , the mobile camera moving object detection method under the strong parallax of the present invention, comprises the following specific steps:
[0026] Step 1: Original image preprocessing: First, match the pixels of the two frames before and after. The mature KLT tracking algorithm has the advantages of fast speed, high precision, and strong anti-noise ability, so the KLT tracking algorithm is used to compare the two frames before and after. The image pixels are matched to obtain the image coordinates of the matching points of the two frames of images (u 1 ,v 1 ), (u 2 ,v 2 ), where u 1 , v 1 Respectively represent the abscissa and ordinate of the pixel on the previous frame image, u 2 , v 2 Respectively represent the abscissa and ordinate of the pixel on the next frame image; secondly, use depth detectors such as Kinect camera and laser radar to obtain the depth information Z of the matching points of the two frames of images relative to the ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com