

Six-degree-of-freedom location posture adjusting device for automatic assembly of large parts
A technology for automatic assembly and large parts, applied in the direction of workpiece clamping devices, manipulators, program-controlled manipulators, etc., can solve problems affecting production quality and production efficiency, limited scope of application, low manual accuracy and efficiency, and achieve assembly efficiency High, large range of motion, low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
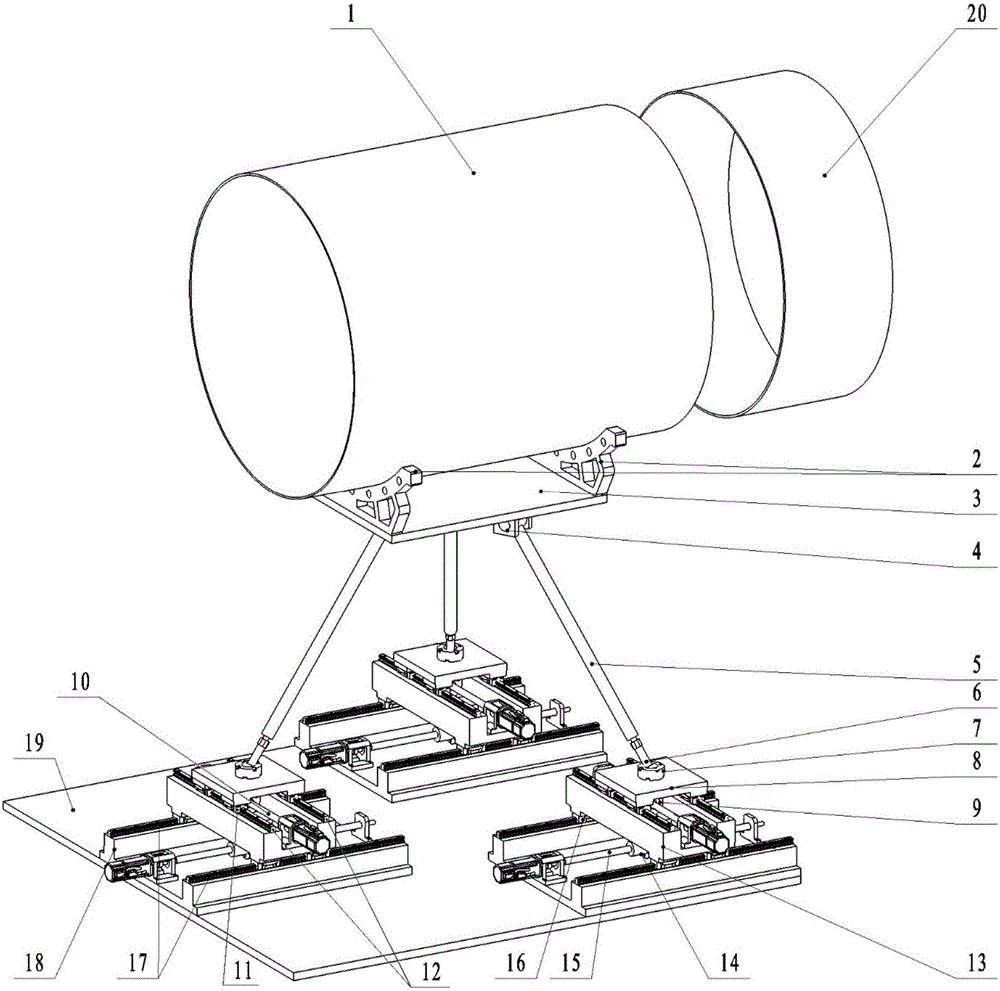
[0025] Such as figure 1 As shown, the present embodiment includes: an adjustment platform 3 with a large component bracket 2, a base 19 and three PPSR branch chains connected thereto respectively, wherein: the large component 1 to be adjusted and the large component bracket 2. Through arc-shaped surface contact connection, the large component bracket 2 is aligned and placed on the adjustment and movement platform 3 and fixedly connected with the adjustment and movement platform 3.
[0026] The adjusting and moving platform 3 adopts a flattened steel plate, which is used to support the large component bracket 2 and the large component 1 to be adjusted.
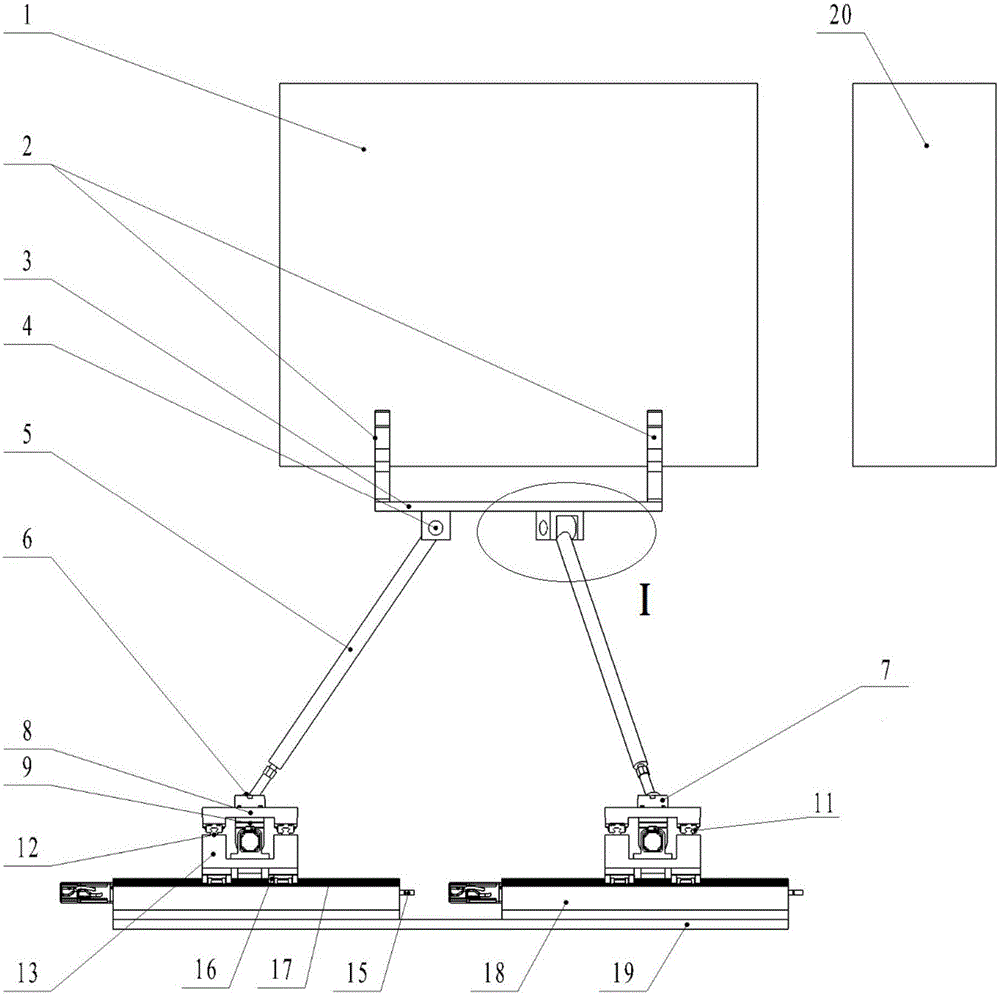
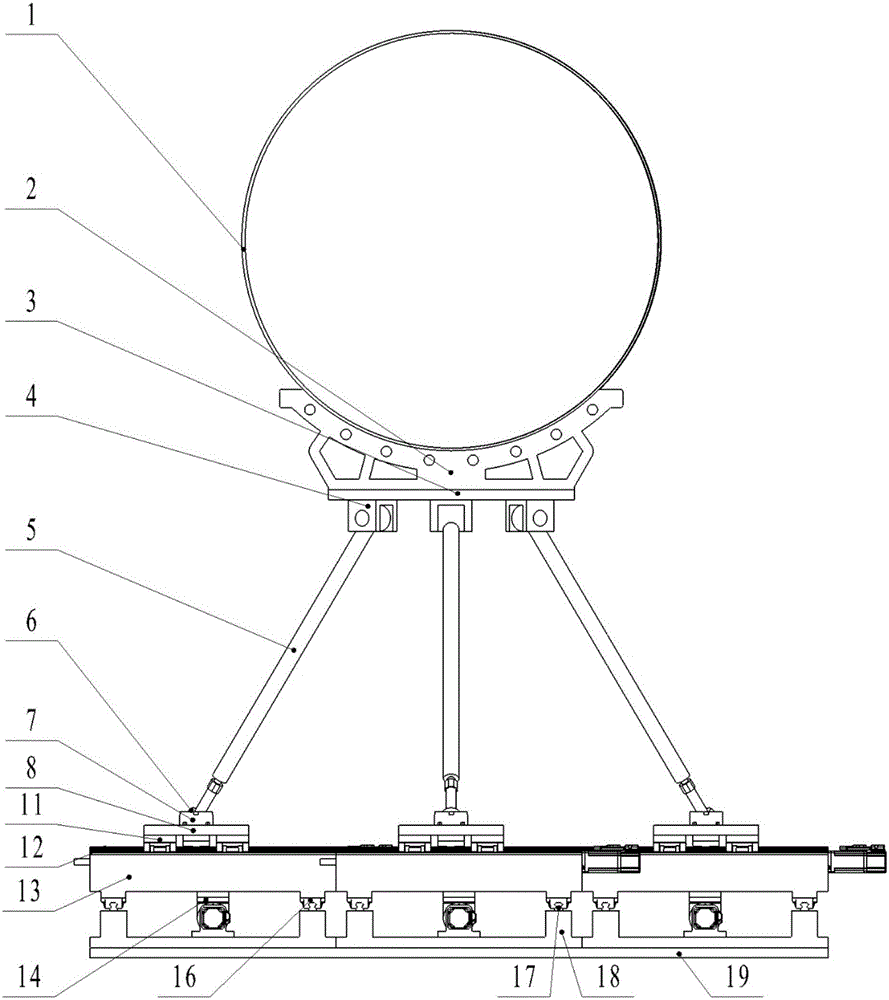
[0027] In this embodiment, the layout of the three PPSR branches is as follows Figure 1 to Figure 3 As shown, the three PPSR branched chain structures are exactly the same.
[0028] Such as Figure 4 As shown, the PPSR branch chain includes: a first moving pair, a second moving pair, a rotating pair 4, a support rod 5, a ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More