

Mobile robot IMU/UWB/code disc loose combination navigation system and method adopting multi-mode description
A combined navigation system and mobile robot technology, which is applied in navigation, navigation, surveying and navigation through speed/acceleration measurement, and can solve problems affecting the performance of single-state combined navigation models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention is described in detail below in conjunction with accompanying drawing:
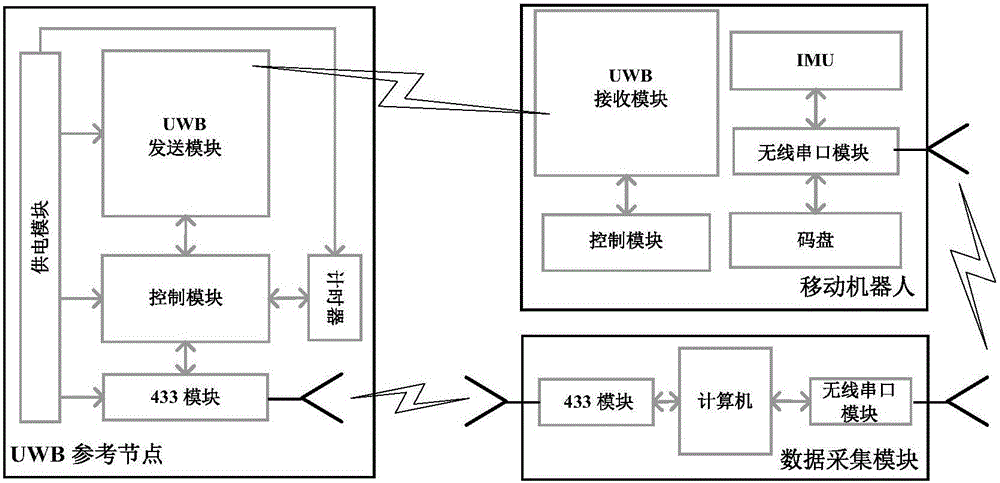
[0038] A mobile robot IMU / UWB / code disc loose integrated navigation system using multi-modal description, such as figure 1 As shown, it includes: a UWB reference node, a mobile robot and a data acquisition module; the UWB reference node communicates with the mobile robot and the data acquisition module respectively, and the mobile robot communicates with the data acquisition module;
[0039] The UWB reference node is used to realize the measurement of the distance between the reference node and the mobile robot; the speed collected by the fixed code disc on the mobile robot is used to judge the motion state of the mobile robot, and the calculation is performed according to the different motion states error estimate.
[0040] The UWB reference node includes: a UWB sending module, a first control module, a first 433 module, a power supply module and a timer; the first control m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More