

Motivation trajectory optimization method of space robot kinetic parameter identification
A technology of space robot and dynamic parameters, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as lack of theoretical support
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention is described in further detail below in conjunction with accompanying drawing:
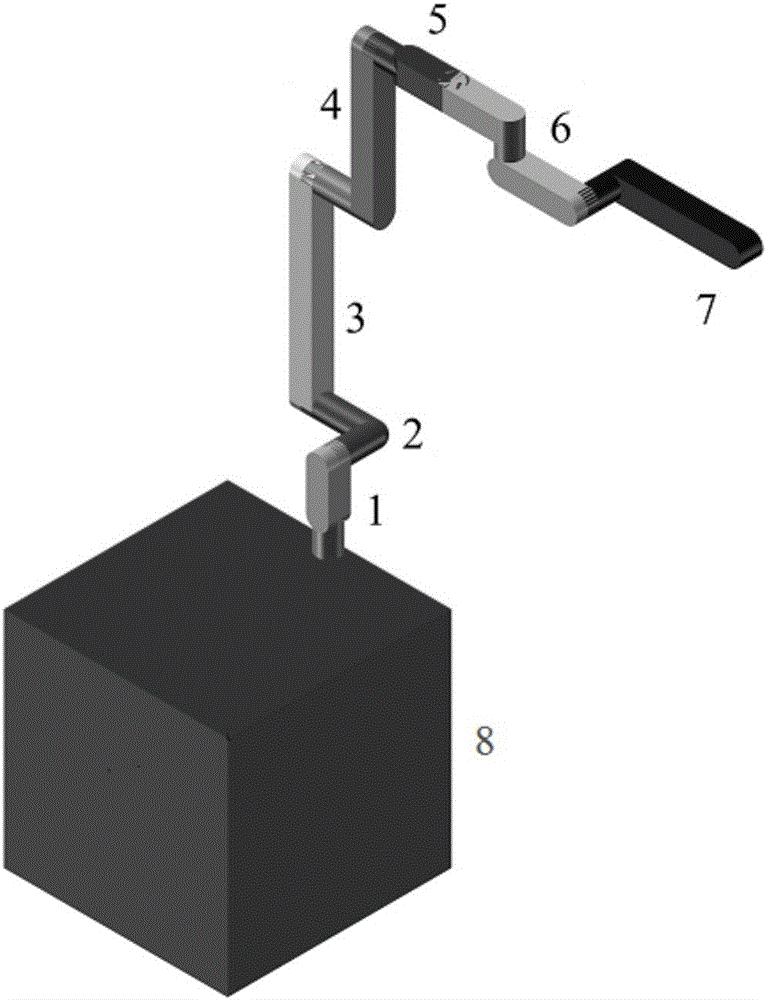
[0072] see Figure 1-Figure 11 , the excitation trajectory optimization method of space robot dynamic parameter identification of the present invention is characterized in that, comprises the following steps:
[0073] Step 1: Establish parameter identification model of free-floating space robot
[0074] The space robot consists of a serial manipulator and a spacecraft platform as a base, where the manipulator is connected by n rotating joints, and all components are regarded as rigid bodies. The base spacecraft is equipped with sensors for measuring base position, attitude, linear velocity and angular velocity, and each joint of the manipulator is equipped with sensors for measuring joint position and angular velocity.
[0075] The linear velocity and angular velocity of the end effector of the space robot are uniformly expressed in matrix form as:
[0076] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More