

Control method and device for mechanical arm of unmanned aerial vehicle
A control method and unmanned aerial vehicle technology, applied to unmanned aircraft, manipulators, program control, etc., can solve the problems of inapplicability, synchronous execution of tasks by human arms, and insufficient mechanical arms of ground robots, so as to achieve simple control methods, The effect of strong stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
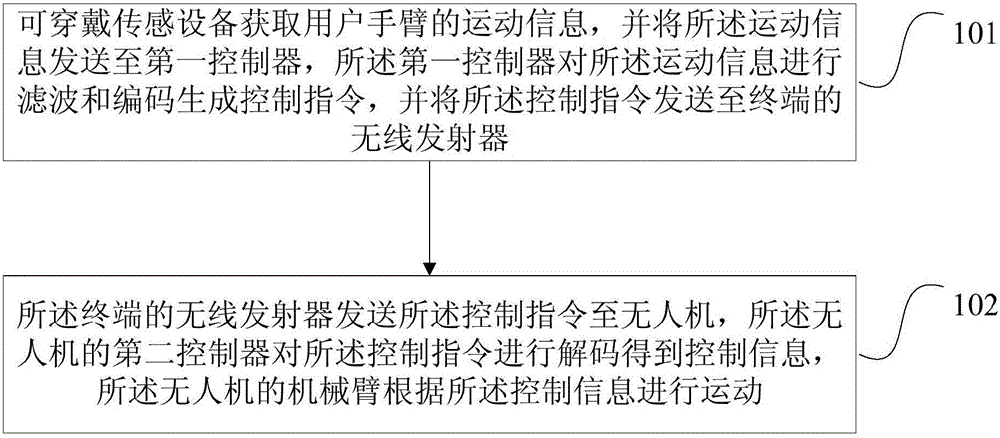
[0025] figure 1 The flow chart of the control method of the UAV mechanical arm provided by Embodiment 1 of the present invention, this embodiment can be applied to the situation that requires high-precision task execution in a complex environment, and the method can be controlled by the UAV and the user equipment to execute, specifically including the following steps:
[0026] Step 101, the wearable sensor device obtains the motion information of the user's arm, and sends the motion information to the first controller, and the first controller filters and encodes the motion information to generate a control command, and sends the motion information The above control command is sent to the wireless transmitter of the terminal.
[0027] Among them, the wearable device can be directly worn on the user's arm, and it can complete powerful interactive functions through integrated hardware and software. Exemplarily, when the user's arm swings, the sensors integrated in the wearable...
Embodiment 2
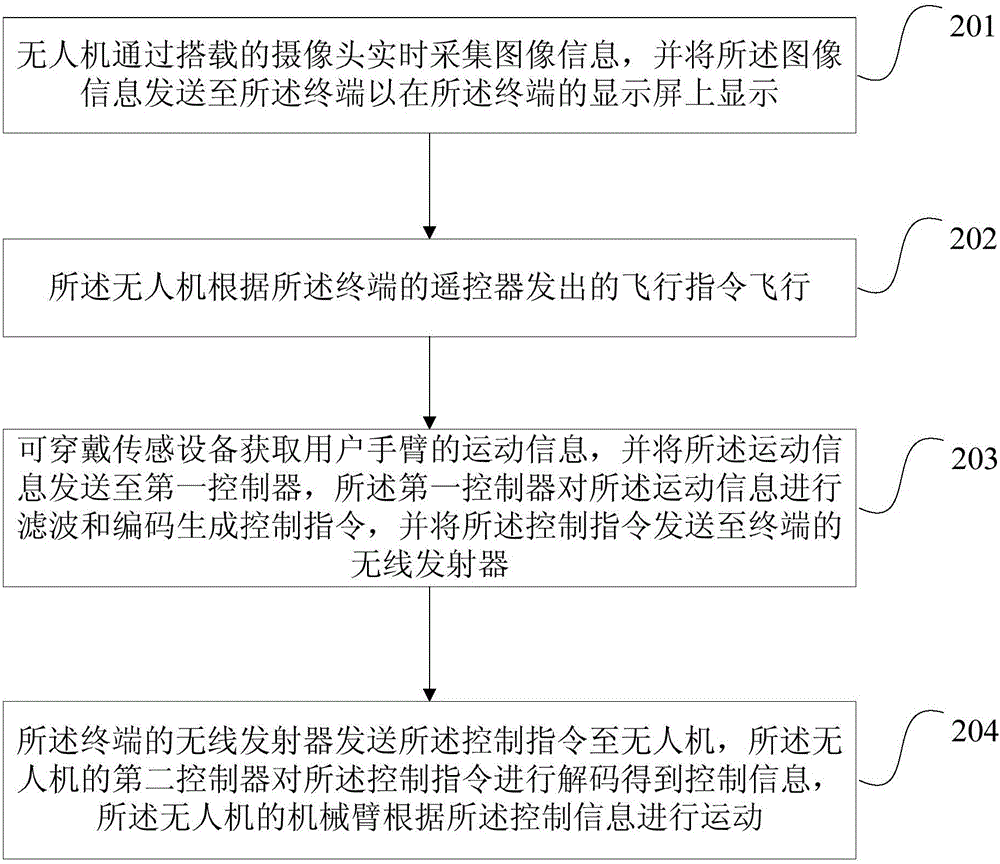
[0033] image 3 It is a flow chart of the control method of the UAV mechanical arm provided by Embodiment 2 of the present invention. On the basis of the above-mentioned embodiments, this embodiment provides a specific process for performing tasks by the UAV. The process consists of It consists of two parts. First, it guides the UAV to fly to the mission location, and then completes the mission execution through the robotic arm, including:
[0034] Step 201, the UAV collects image information in real time through the mounted camera, and sends the image information to the terminal to be displayed on the terminal's display screen.
[0035] Exemplarily, the UAV in this solution uses a multi-rotor UAV. When the UAV is in flight, images are collected in real time and transmitted to the terminal. The terminal displays the surrounding environment of the UAV through the display screen.
[0036] Step 202, the UAV flies according to the flight instruction sent by the remote controller ...
Embodiment 3
[0042] Figure 4 It is a flowchart of the control method of the UAV mechanical arm provided by the third embodiment of the present invention. On the basis of the above-mentioned embodiments, this embodiment provides a specific control process of the mechanical arm. This solution includes the following steps .
[0043]Step 301, the wearable sensor device acquires the motion information of the user's arm, and sends the motion information to the first controller, and the first controller filters and encodes the motion information to generate a control command, and sends the motion information The above control command is sent to the wireless transmitter of the terminal.
[0044] Step 302, the wireless transmitter of the terminal sends the control command to the UAV, the second controller of the UAV decodes the control command to obtain control information, and the robotic arm of the UAV according to The control information is exercised.
[0045] Step 303, the second controller...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More