Wheeled and legged robot
A robot and gear technology, applied in the field of automation control, can solve problems such as instability, easy rollover, and low speed of travel, and achieve the effect of accelerating the speed of travel, increasing efficiency and passability, and reducing the possibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
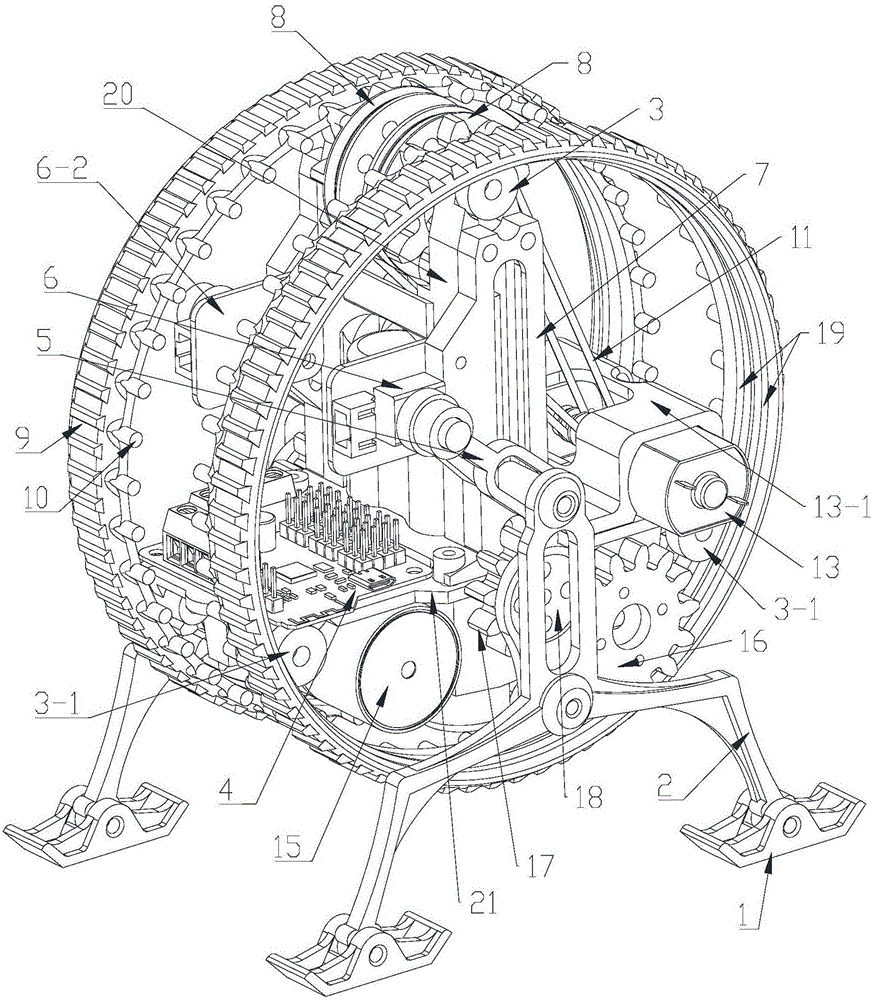
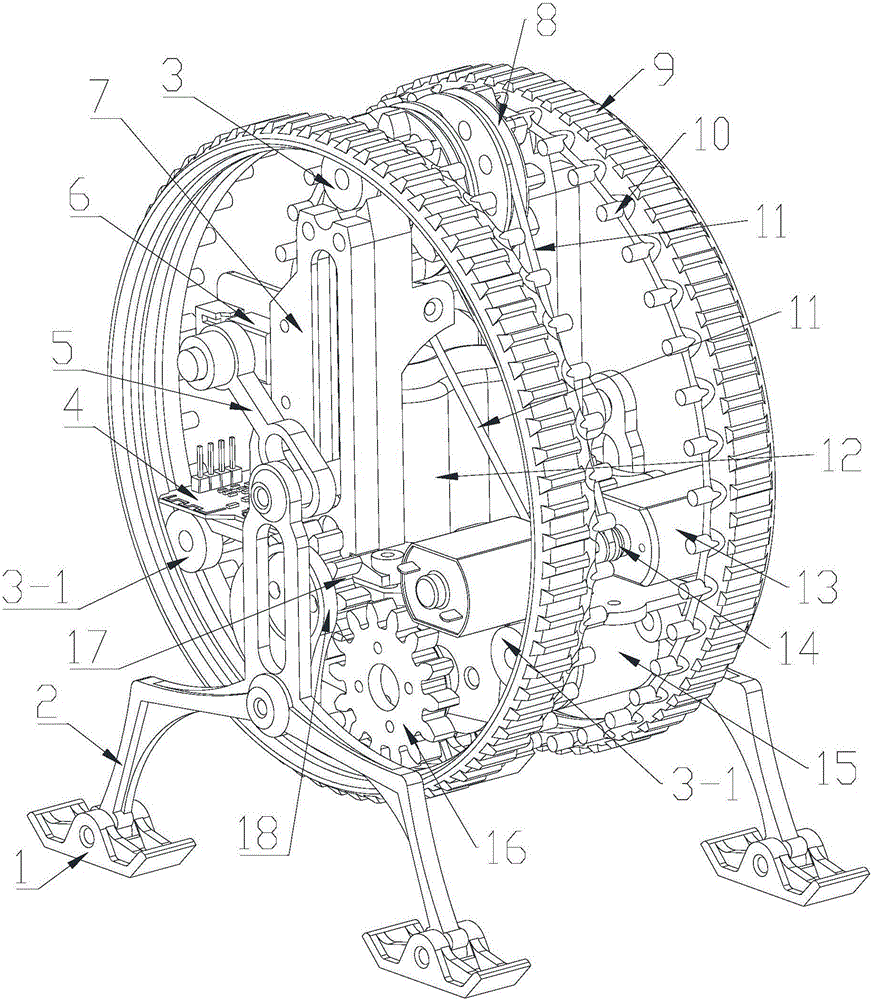
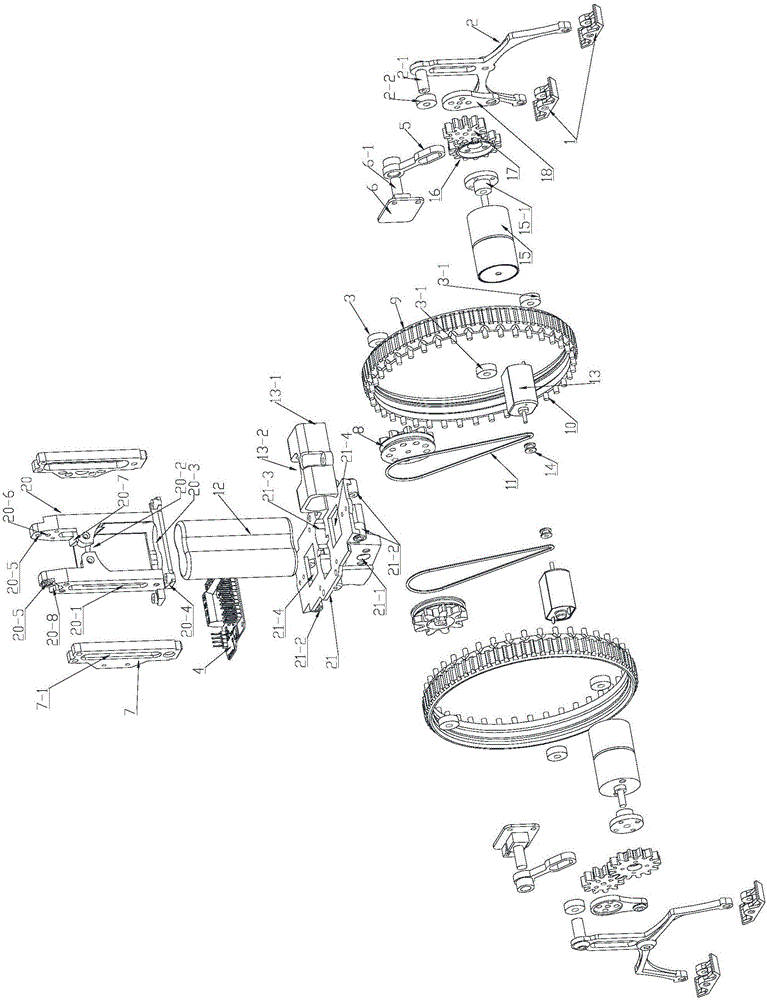
[0060] see Figure 1~4 , this example is a further improvement on the basis of Embodiment 1. The wheels are provided with left and right two, which are respectively driven by a wheel driving device; the legs are provided with left and right two, which are respectively driven by a foot driving device Driven, and the two legs are located on the outside of the corresponding wheel.
[0061] In this example, the gear teeth 10 are evenly distributed along the inner sidewall of the wheel, the gear teeth 10 are set as cylindrical, the central axis of the gear teeth 10 is parallel to the axial direction of the wheel, and the gear teeth 10 are connected to the driven belt. The teeth of the driven pulley on one side of the gear 8 are meshed; this structure is more suitable for the design with two wheels.
[0062] Further, a rear cross beam is provided between the rear sides of the two vertical boards, a front cross beam is provided between the front sides of the two vertical boards, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com