

Multi-sensor integrated unmanned plane perception and circumvention simulation system and method
A multi-sensor fusion and simulation system technology, applied in the field of multi-sensor fusion UAV perception and avoidance simulation system, can solve the problems of high cost, high test risk coefficient, low efficiency, etc., and achieve low cost, low test risk, and simplified effect of complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
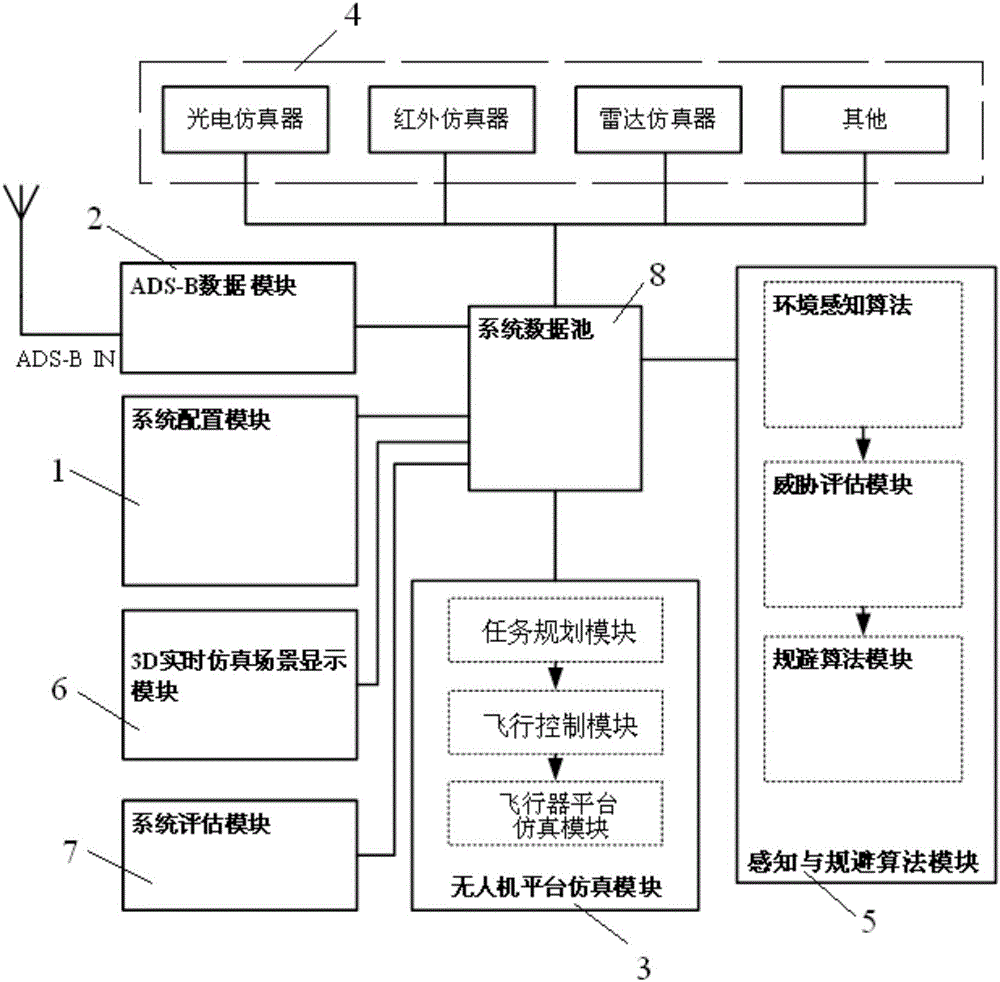
[0044] The present invention provides a multi-sensor fusion UAV perception and avoidance simulation system, see figure 1 , using a distributed modular simulation structure, including: system configuration module 1, ADS-B data module 2, sensor data simulation module 4, perception and avoidance algorithm module 5, 3D real-time simulation scene display module 6, and system evaluation module 7, Each of the above modules implements data interaction with the system data pool 8 through fixed IP and TCP / IP protocols. Wherein, the sensor data simulation module 4 specifically includes photoelectric sensors, infrared sensors, radar sensors and other sensors.
[0045] 1. The system configuration module 1 is used to complete the parameter configuration and system initialization of the simulation system, and send the parameters and initialization informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More