

Improved type active disturbance rejection controller
An active disturbance rejection controller and controller technology, applied in the control system, observer control, AC motor control, etc., can solve the problems of system performance deterioration, unavoidable high-frequency flutter, large oscillation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
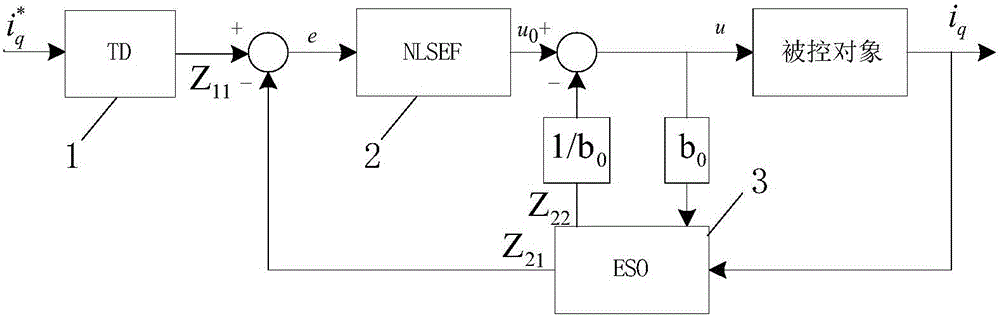
[0032] Such as figure 1 As shown, this embodiment includes a tracking differential controller 1TD, an extended state observer 3ESO, and a nonlinear state error feedback control rate 2NLSEF; the tracking differential controller 1 provides a signal to the input current Arrange the transition to obtain a smooth transition signal; track the output signal of the differential controller 1 and an output signal Z of the extended state observer 3 21 By comparison, the system error e is obtained; the system error is used as the input signal of the nonlinear state error feedback control rate 2; the total disturbance of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More