

Gesture adjusting device
A technology for adjusting devices and attitudes, which is applied in the field of automatic machinery and equipment design, and can solve problems such as cable failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
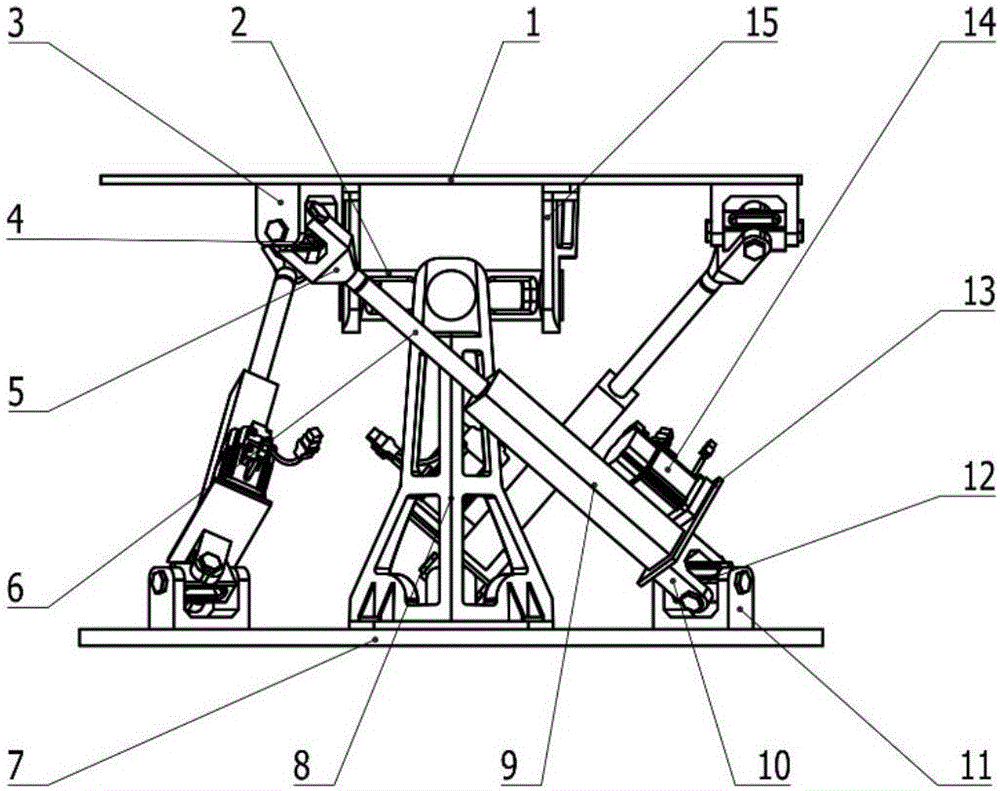
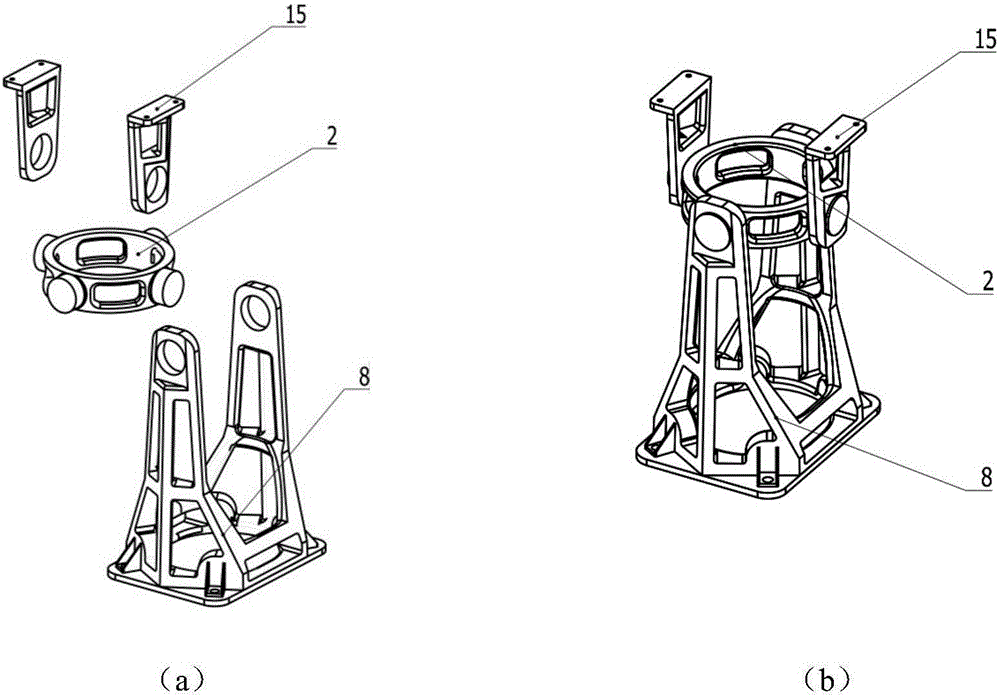
[0024] The structure of a posture adjustment device in this embodiment is as follows: figure 1 As shown, it includes a moving platform 1 installed with an actuator, a fixed platform 7 and the first, second, third, and fourth branch chains, and the four branch chains are respectively connected between the moving platform 1 and the fixed platform 7, and It forms a space closed-loop mechanism with the moving platform 1 and the fixed platform 7 .
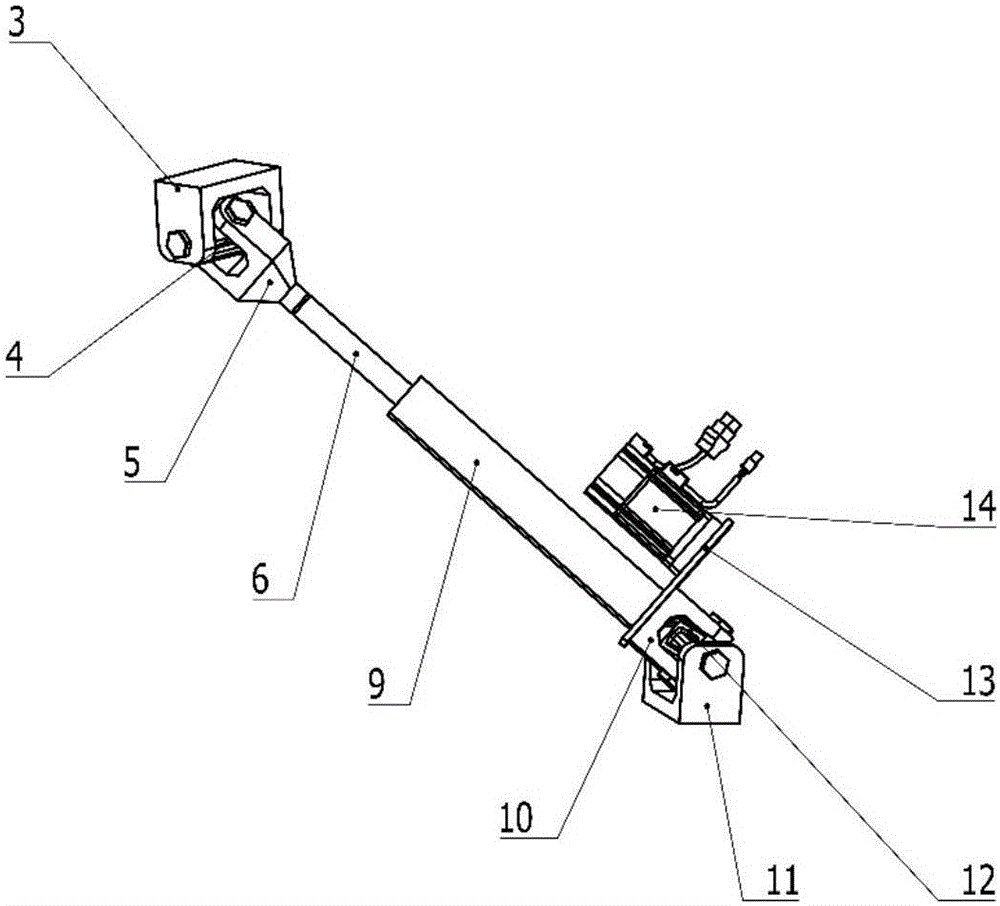
[0025] The first, second, and third branch chains are unconstrained branch chains with six degrees of freedom in space with the same structure, and all contain an actively driven kinematic pair; figure 2 As shown, each branch chain includes: upper connecting piece 3, lower connecting piece 11, upper cross block 4, lower cross block 12, upper U-shaped piece 5, lower U-shaped piece 10, telescopic rod 6, electric cylinder 9 , connecting plate 13, motor 14 and connecting kinematic pair. There are six kinematic pairs, one is a rotating pa...
Embodiment 2
[0032] The structure of a posture adjustment device in this embodiment is as follows: Figure 5As shown, including the moving platform 01, the fixed platform 05 and the first, second and third branch chains, the first, second and third branch chains are unconstrained branch chains with the same structure and six degrees of freedom in space, each containing a Actively driven kinematic pairs; the three branch chains are respectively connected between the moving platform 01 and the fixed platform 05, and form a space closed-loop mechanism with the moving platform 01 and the fixed platform 05. The space parallel closed-loop mechanism moves through three inputs Drive the motion of the moving platform to achieve two rotational degrees of freedom.
[0033] The first, second, and third branched chain structures are the same, such as Figure 6 As shown, each branch chain includes: upper connecting slide rail 010, U-shaped slide block 09, cross block 02, U-shaped piece 08, telescopic r...
Embodiment 3
[0038] The structure of a posture adjustment device in this embodiment is as follows: Figure 8 As shown, it includes the moving platform 001, the fixed platform 008 and the first, second, and third branch chains. The three branch chains are connected between the moving platform 001 and the fixed platform 008 respectively, and are connected The platform 008 constitutes a space closed-loop mechanism.
[0039] The first, second, and third branch chains, such as Figure 9 As shown, all include: upper connecting piece 002, lower connecting piece 009, upper cross block 003, lower shaft pin 0010, upper U-shaped piece 004, lower U-shaped piece 0011, telescopic rod 0012, electric cylinder body 005, connecting plate 007 , motor 006 and motion pair. There are 6 kinematic pairs, one is a rotating pair connected between the upper connecting piece 002 and the upper cross block 003, one is a rotating pair connected between the upper cross block 003 and the upper U-shaped member 004, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More