

Double-arm mobile robot system based on binocular vision
A mobile robot, binocular vision technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of lack of autonomy and intelligence, and low degree of robot intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
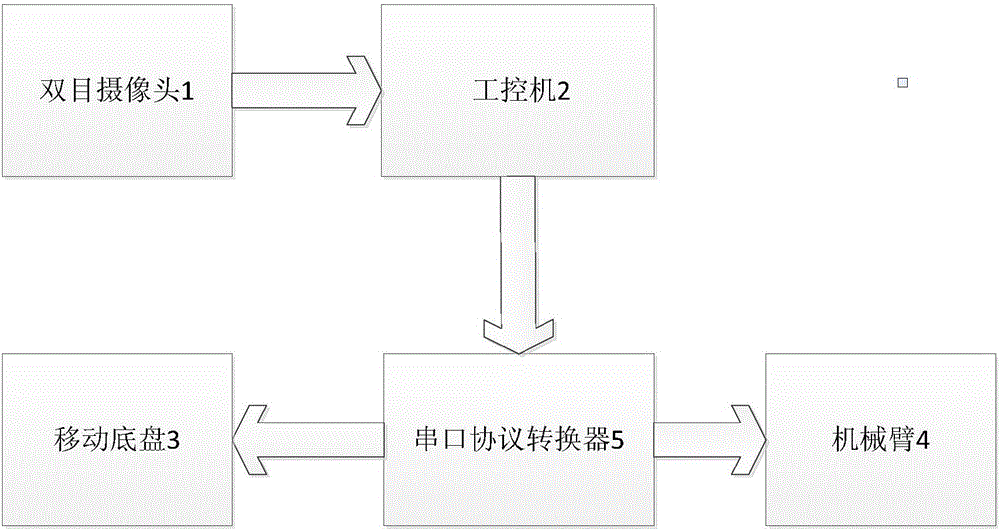
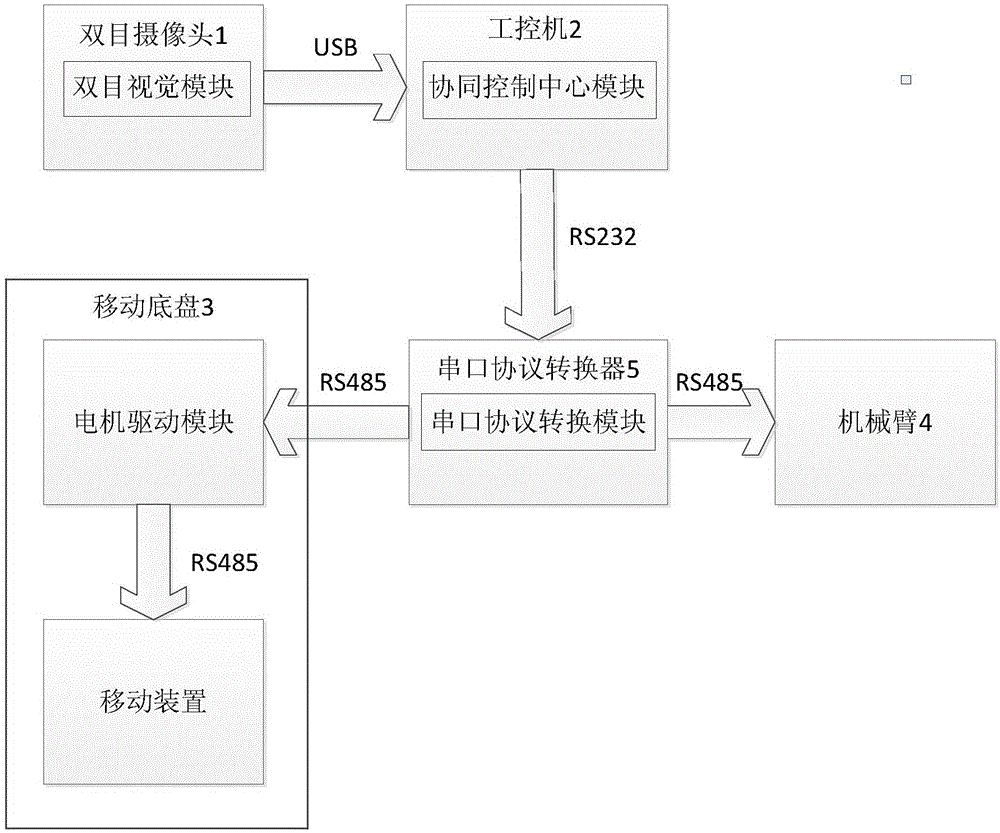
[0038] see figure 1 Described, the dual-arm mobile robot system based on binocular vision provided by the embodiment of the present invention includes: binocular camera 1, industrial computer 2, serial port protocol converter 5, mechanical arm 4 and mobile chassis 3; Wherein,
[0039] The binocular camera 1 is used to collect images of target objects in real time, and upload the collected images to the industrial computer 2;
[0040] The industrial computer 2 is used to process the received image, obtain the position information of the target object, and generate a motor control command and a control command of the mechanical arm 4 according to the position information of the target object, and generate The motor control command and the control command of the mechanical arm 4 are sent to the serial port protocol converter 5;
[0041] The serial port protocol converter 5 is used to perform protocol conversion on the received motor control command and the control command of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More