Three-dimensional movement simulation method for high-altitude curtain wall installation robot
A three-dimensional motion, robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as teleoperation delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
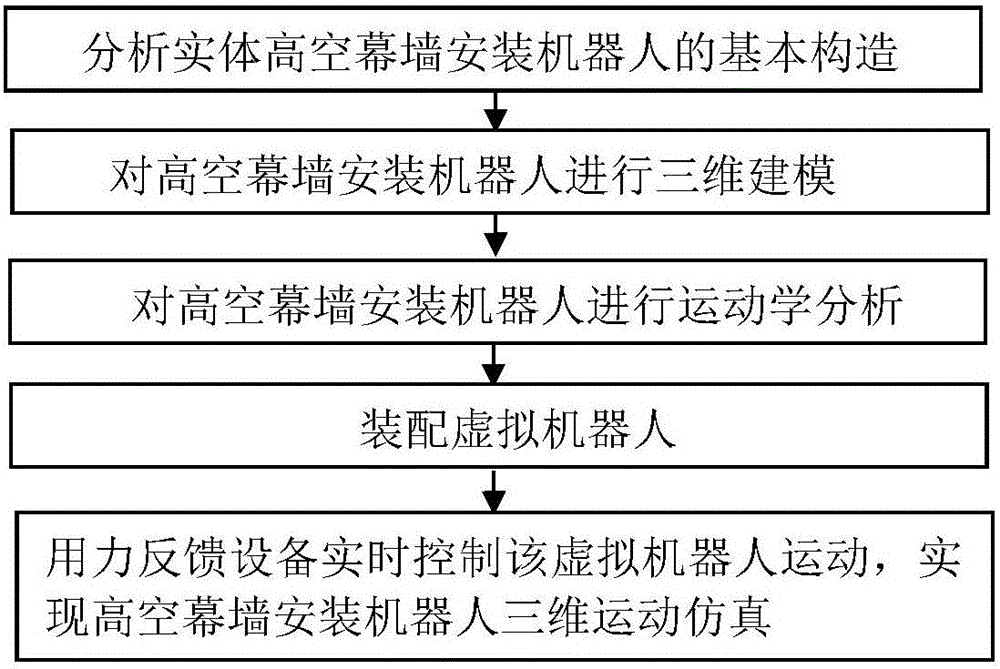
[0090] The method for the three-dimensional motion simulation of the high-altitude curtain wall installation robot of the present embodiment, the steps are as follows:
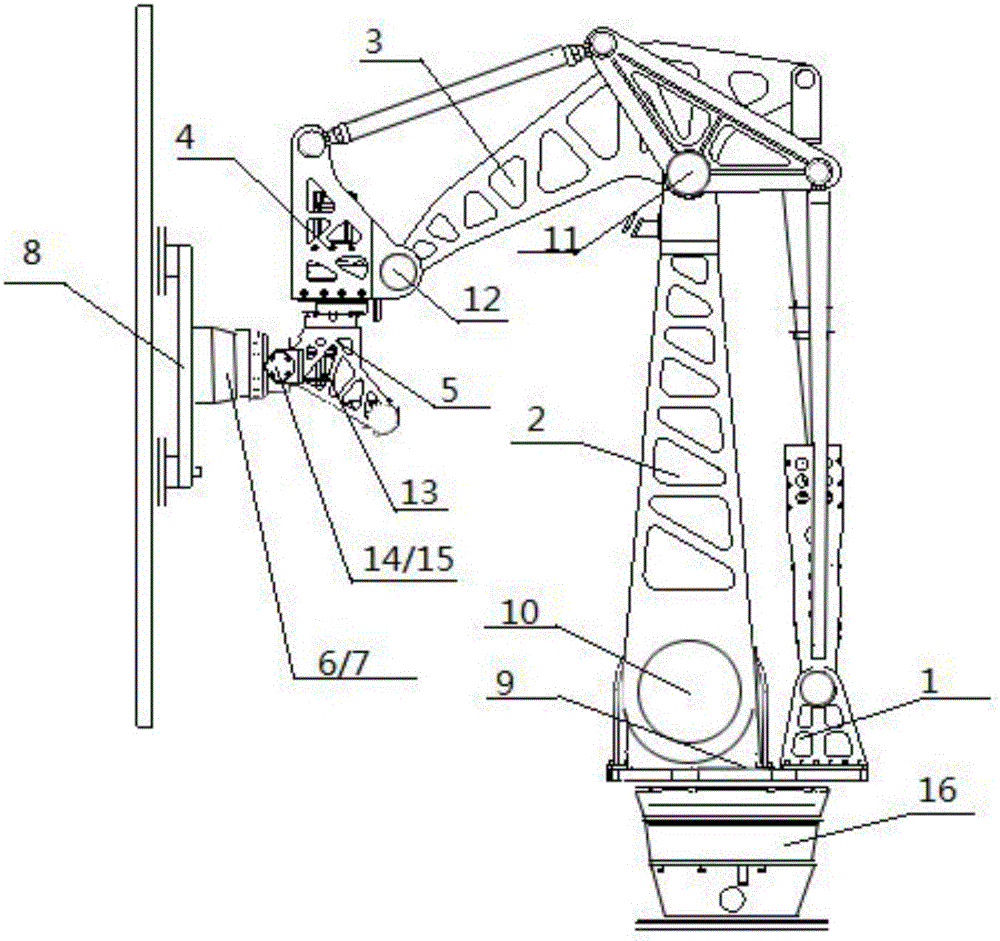
[0091] The first step is to analyze the basic structure of the solid high-altitude curtain wall installation robot:
[0092] Analyze the basic structure of the solid high-altitude curtain wall installation robot, and determine the structure and size of the main parts of the high-altitude curtain wall installation robot;
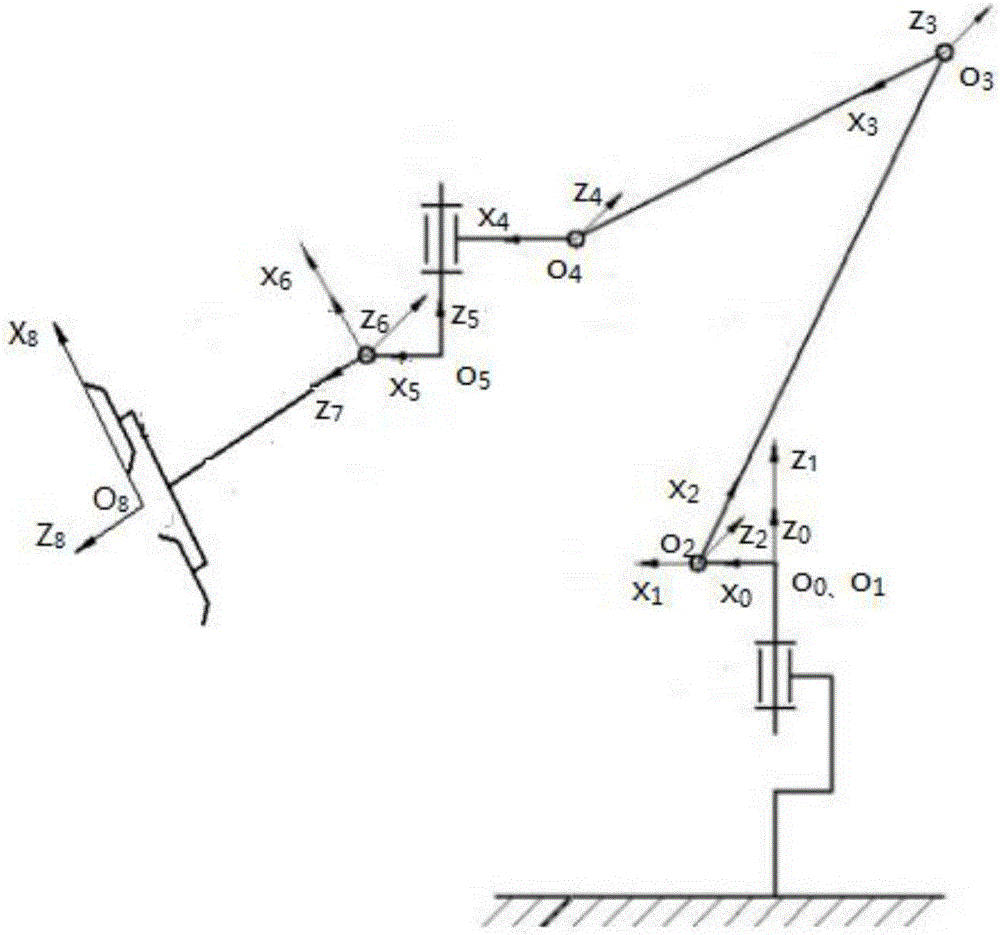
[0093] The basic structure of the entity of the high-altitude curtain wall installation robot of the present embodiment is as above-mentioned figure 2 In the embodiment shown, the main parts of the high-altitude curtain wall installation robot, that is, the structure and size of each connecting rod, that is, the connecting rod parameter table is shown in Table 1.
[0094] Table 1. The connecting rod parameters of the high-altitude curtain wall installation robot
[0095]
[0096] The co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More