Multifunctional large-torque integrated robot joint
A technology of robot joints and high torque, applied in the field of robotics, can solve problems such as difficulty in realizing cross-industry modularization, inability to apply in multiple fields and industries, and limitation of reconfigurable diversity. It is easy to assemble and disassemble and maintain, and has a simple structure. Reliable, quick and easy connection and removal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
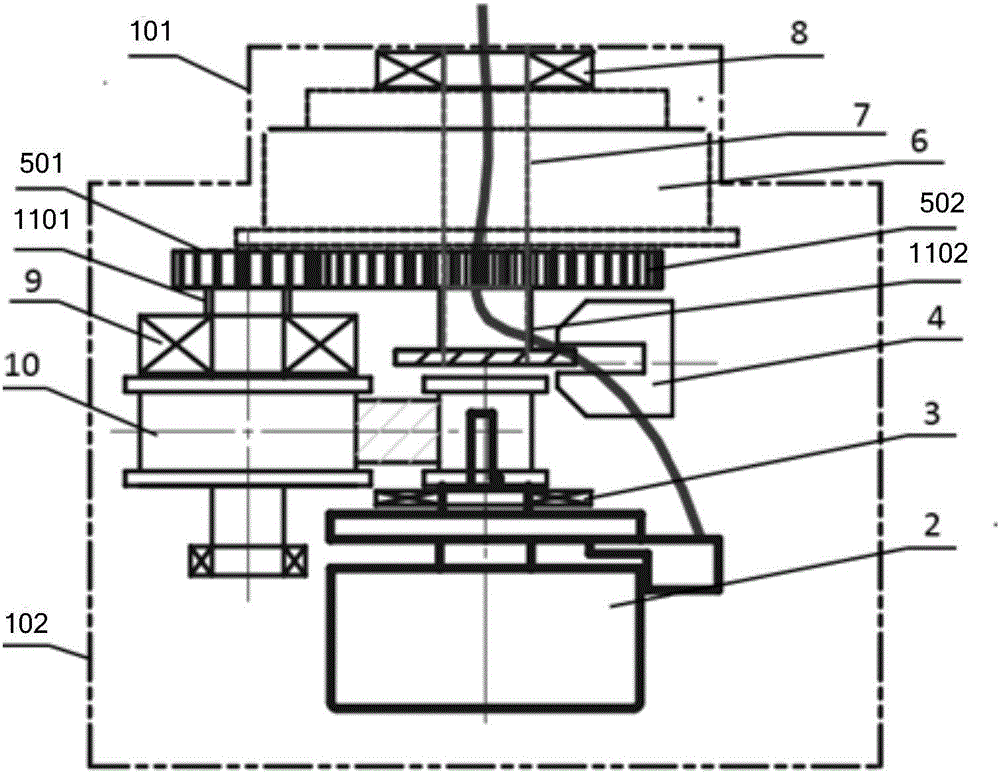
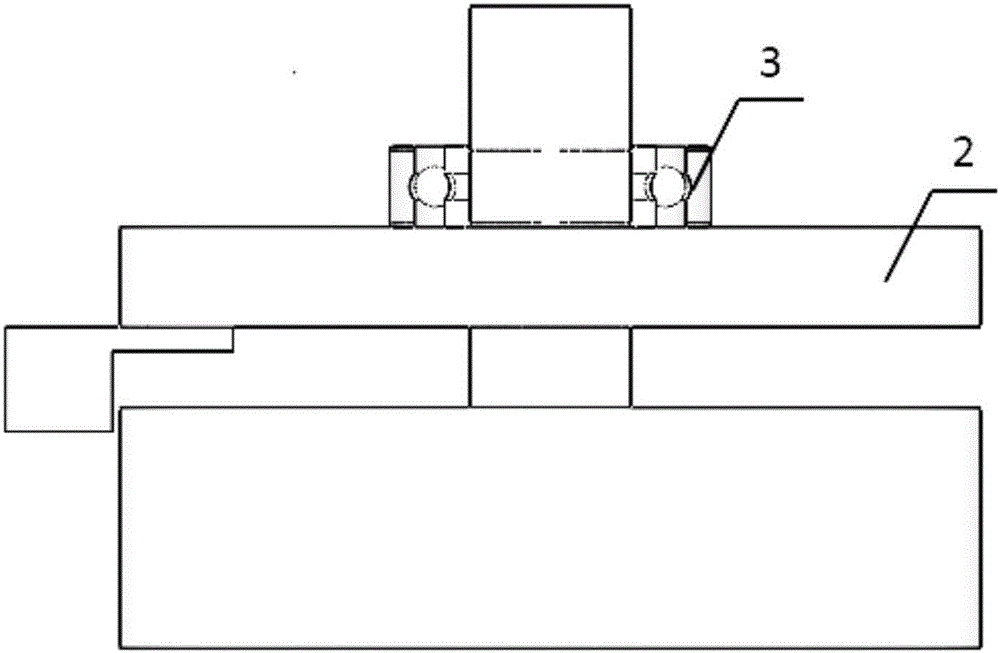
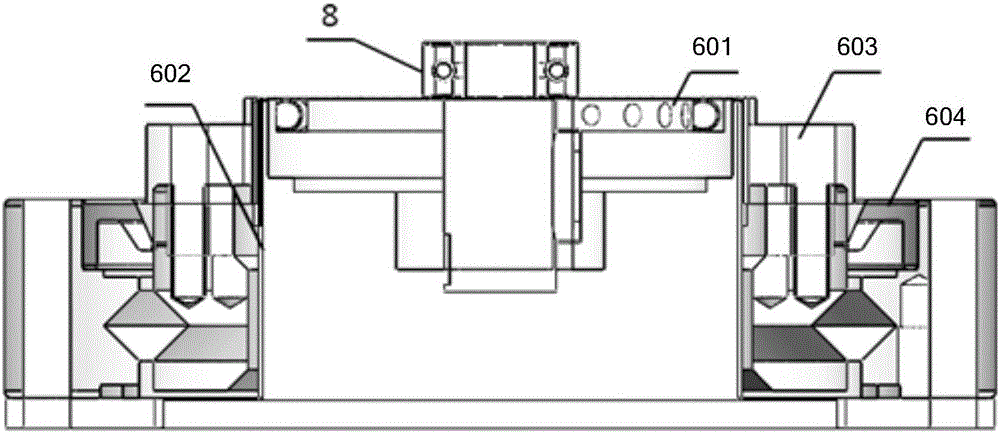
[0037] In this embodiment, the multifunctional high-torque integrated robot joint provided by the present invention includes a DC servo motor 2, a pulley set, a gear set, a hollow harmonic reducer 6, a hollow output shaft 7, a hollow encoder 4, a hollow Output shaft end bearing 8, and drive control board;
[0038] Wherein, the pulley set includes a large pulley 10 and a small pulley; the gear set includes a small gear 501 and a large gear 502;
[0039] The DC servo motor 2 drives the small pulley...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More