

Distributed MIMO radar target tracking accuracy joint resource optimization method
A radar target tracking and resource optimization technology, applied in the field of distributed MIMO radar target tracking accuracy joint resource optimization, can solve the problem that the target position cannot be obtained in advance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
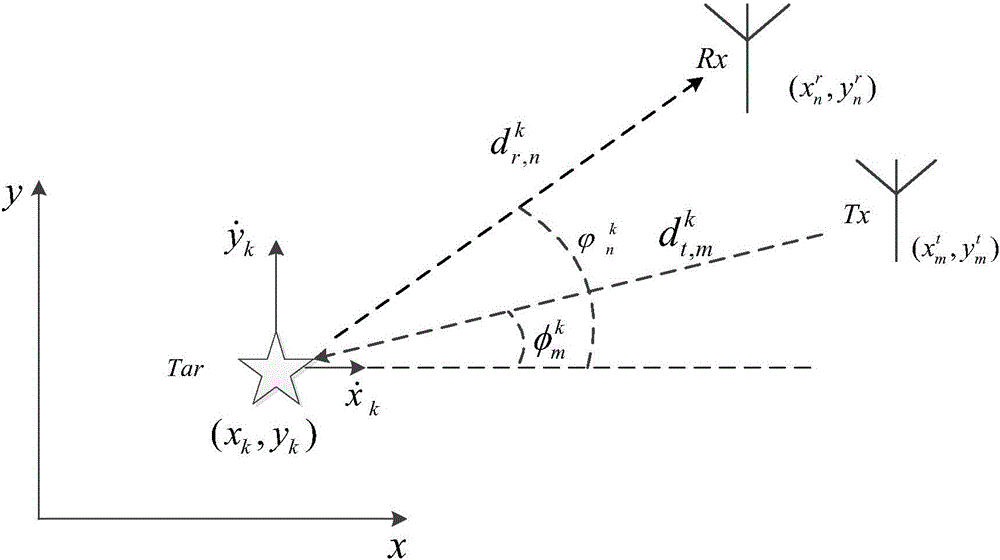
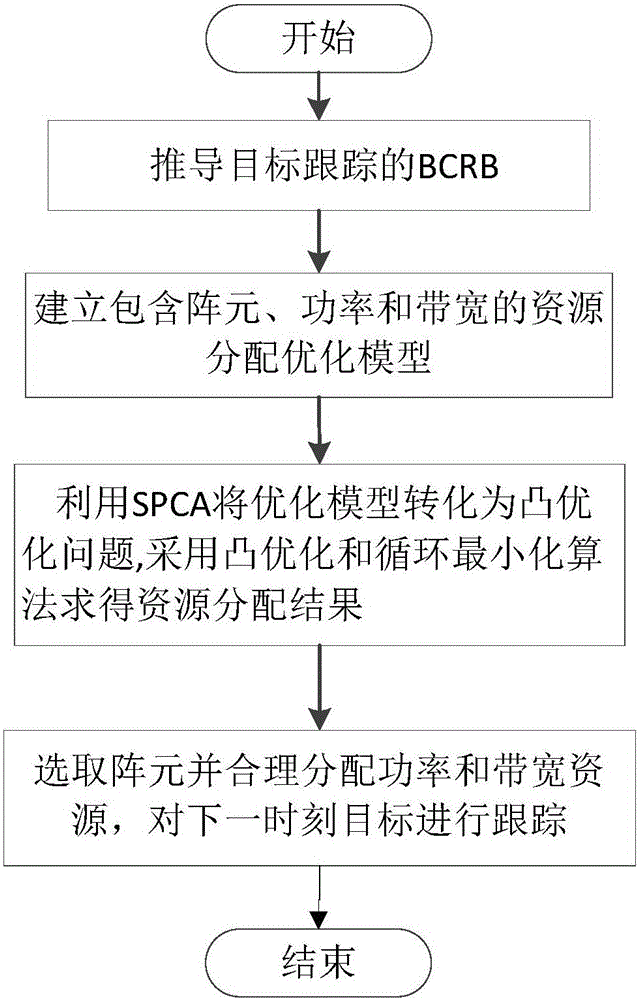
[0088] Embodiment one, see Figure 1~2 As shown, a distributed MIMO radar target tracking accuracy joint resource optimization method includes the following steps:
[0089] Step 1, deriving the Bayesian Cramerot bound BCRB of the moving target position, and determining the objective function;
[0090] Step 2. By minimizing the objective function, a resource allocation optimization model including three variables of array element, power and bandwidth is established;
[0091] Step 3, using the SPCA method to transform the resource allocation optimization model into a convex optimization problem, and solve it through the convex optimization method and the circular minimization method, and obtain the selected array element and the final power allocation result, as well as the optimal bandwidth allocation vector;
[0092]Step 4. Estimate and track the target position at the next moment according to the selected array element, the final power allocation result and the optimal bandw...
Embodiment 2
[0094] Embodiment two, see Figure 1-8 As shown, a distributed MIMO radar target tracking accuracy joint resource optimization method includes the following content:
[0095] (1) Determination of the objective function
[0096] Use the observed vector r to estimate an unknown vector to be estimated Its BCRB can be expressed as:
[0097]
[0098] where J B Indicates Bayesian information matrix (BIM, Bayesian information matrix), C B represents the BCRB matrix, J B Can be expressed as a linear superposition of two matrices:
[0099]
[0100] Among them, J D (x k ) = E xk [J r (x k )], representing the joint probability density function with respect to the target state vector x k expectations, and J r (x k ) means that the BCRB is related to the system observations at time k, and can be obtained by the chain rule:
[0101]
[0102] Among them, the Jacobian matrix Represents the partial derivative with respect to the target state vector, given by the ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More