

Auto-disturbance-rejection iterative learning-based multi-motor synchronous control method
A technology of iterative learning and synchronous control, applied in motor generator control, electronically commutated motor control, multiple motor speed regulation, etc., can solve problems such as slow global convergence ability, poor synchronization performance and tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings.
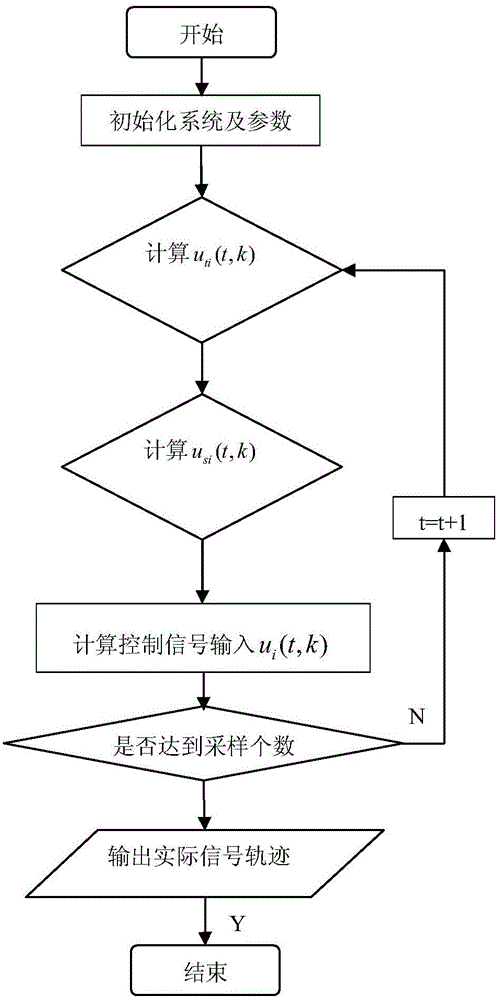
[0067] refer to Figure 1-Figure 7 , a multi-motor synchronous control method based on ADRC iterative learning, including the following steps:
[0068] Step 1, establish a multi-motor system mathematical model, initialize the system state and control parameters, the process is as follows:
[0069] 1.1, the multi-motor system model is as follows:
[0070] ω · i ( t ) = 1.5 Ωn p ψ f J i q - Ω J ω i ( t ) - 1 J...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More