

Stability control method for four-wheel independent driving electric automobile based on Q-learning
A four-wheel independent drive, stability control technology, applied in electric vehicles, control drives, control devices, etc., can solve the problems of changing control algorithm parameters, poor robustness and practicability of the control system, and single control algorithm parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
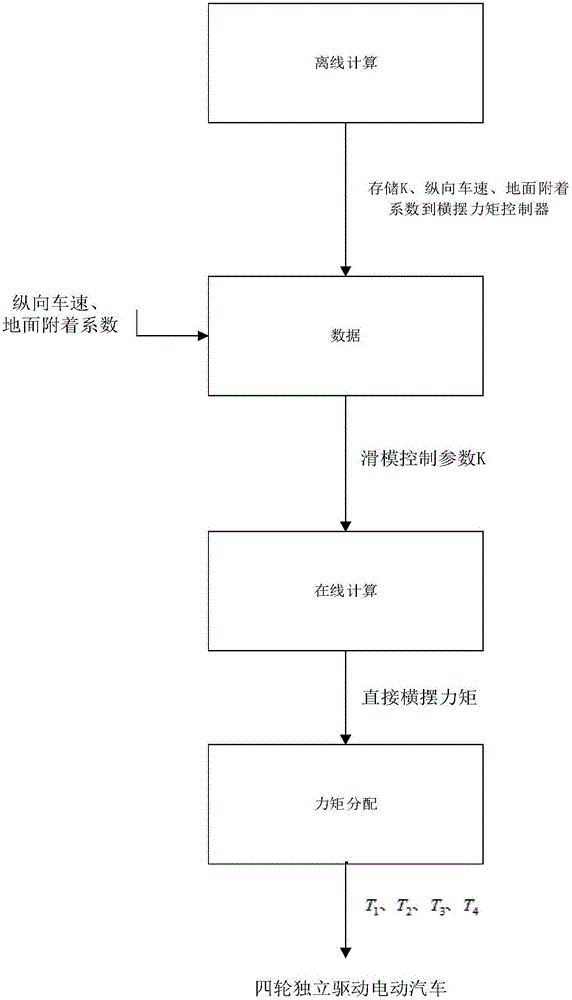
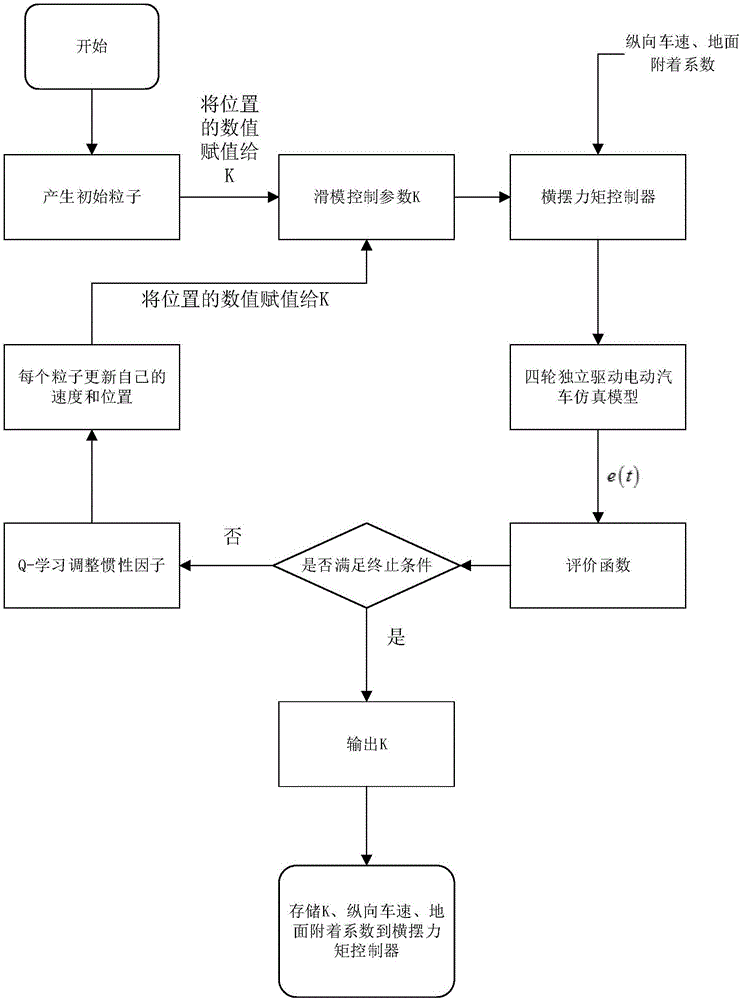
[0077] The present invention will be further described below in conjunction with the accompanying drawings. A flow chart of a stability control method for four-wheel independent drive electric vehicles based on Q-learning figure 1 As shown, the process of step B2 is as follows figure 2 shown.
[0078] In the prior art, the design of the stability control system of four-wheel independent drive electric vehicles mainly adopts the intelligent control algorithm. After using the intelligent control algorithm, the calculation period of the intelligent control algorithm is relatively long, and sometimes it takes several minutes to iterate one step. This is obvious It does not meet the real-time requirements of the four-wheel independent drive electric vehicle stability control system. The present invention adopts the off-line calculation mode, and stores the data in the yaw stability controller in the form of a table. When the car is running, the online calculation only needs to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More