White asparagus harvesting robot based on machine vision, and harvesting method
A technology of machine vision and robotics, applied to agricultural machinery and implements, cutters, harvesters, etc., can solve the problems of excessive labor, heavy workload, and low efficiency, and achieve simplified harvesting steps, high automation, and improved harvesting. The effect of yield
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
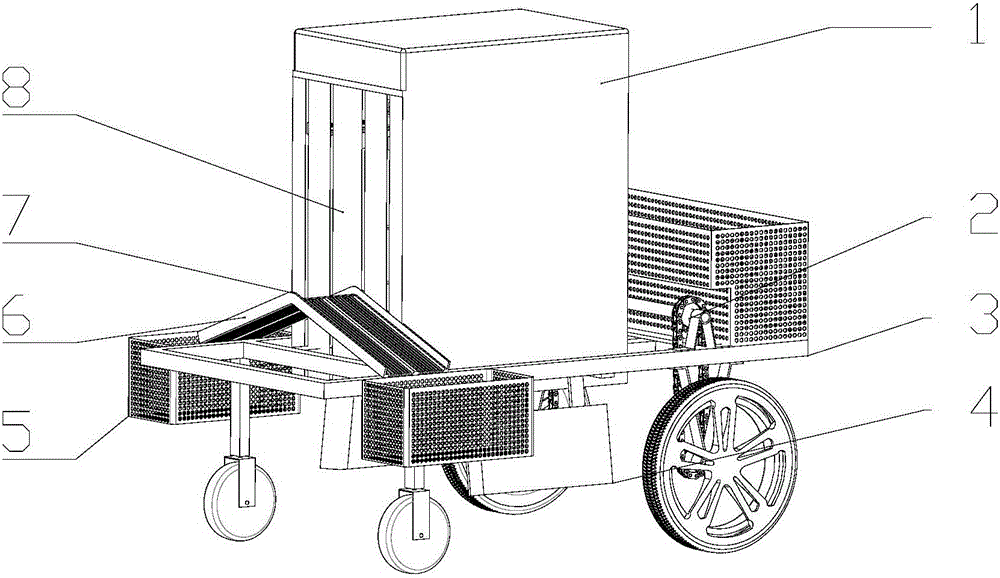
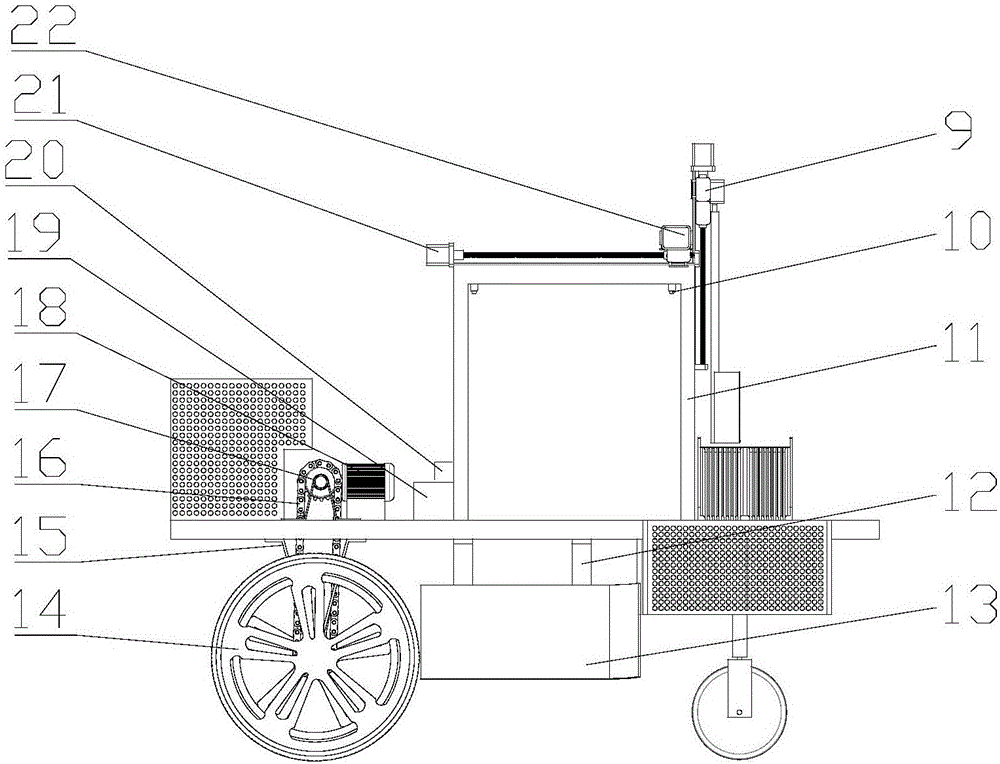
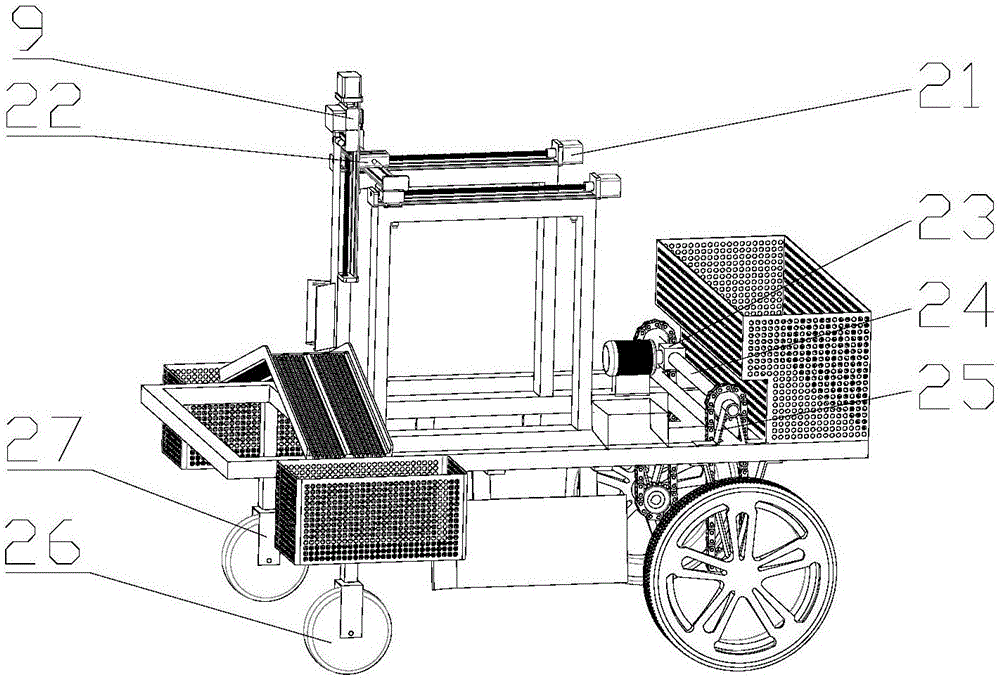
[0036] The present invention will be further described below in conjunction with the accompanying drawings. A robot for harvesting white asparagus based on machine vision, such as figure 1 , 2 , shown in 3, described running device comprises traveling wheel (14), universal wheel (26), drive motor (18), worm gear transmission (23), power transmission shaft (24), sprocket wheel (17), chain (16), traveling wheel support (15), universal wheel support (27), transmission shaft support (25). There are two traveling wheels (14), which are respectively fixed on the rear half of the frame (3) by a traveling wheel support (25), as a driving wheel assembly for the selective white asparagus harvesting robot to advance; There are two universal wheels (26), which are symmetrically fixed on the front half of the frame (3) by universal wheel supports (27) respectively, so as to realize turning in the walking process of the robot; the drive motor (18) is fixed On the beam of the frame (3), t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More