Electric box carrying mechanical hand
A technology of manipulators and boxes, applied in the direction of manipulators, chucks, manufacturing tools, etc., to achieve the effect of simple structure, compact overall structure, convenient installation and maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Structural principle of the present invention is described in detail below in conjunction with accompanying drawing:
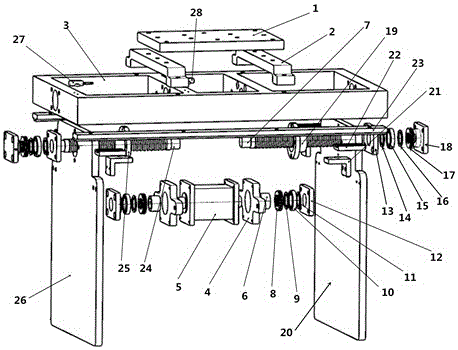
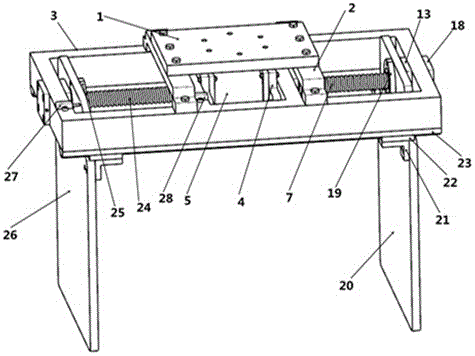
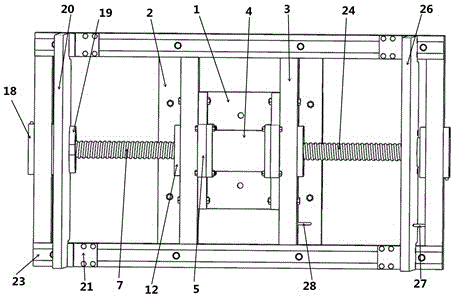
[0021] The electric box handling manipulator includes a fixed plate 1 connected to the end of the robot, a fixed support 2 installed under the fixed plate 1, a base 3 installed under the fixed support 2; a motor fixed seat installed inside the truss of the base 3 4. The double output shaft stepping motor 5 installed on the motor fixing seat 4, the double output shaft stepping motor 5 is connected with the ball screw 7 through the coupling 6, and the plane thrust bearing 8 is installed in the mounting hole of the base 3 , the plane thrust bearing 8 is installed on one end of the ball screw 7 through the bearing gasket 9 and the deep groove ball bearing 10, and the deep groove ball bearing 10 is installed on the base 3 together with the bearing end cover 12 through the bearing gasket 11; the bearing The end cover 13 is installed on the inner side of the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More