

Joint type wall-climbing robot applicable to curved surface
A wall-climbing robot and articulated technology, applied in the field of intelligent robots, can solve the problems of inability to adjust, low wall-climbing efficiency, insufficient stability, etc., and achieve the effects of stable adsorption, simple and flexible structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with the accompanying drawings.
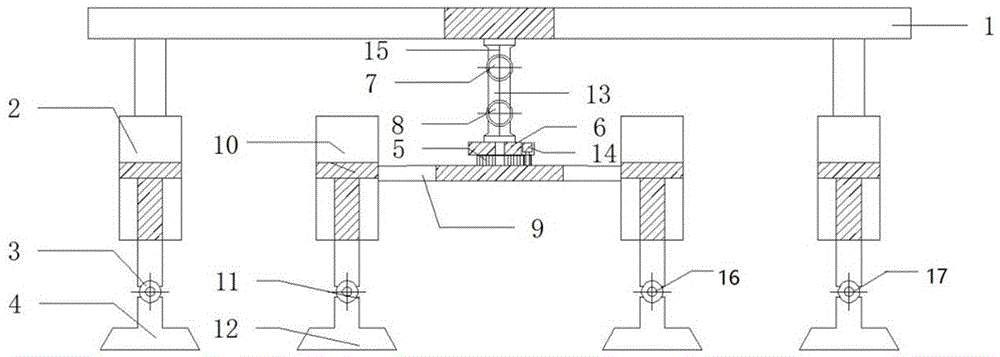
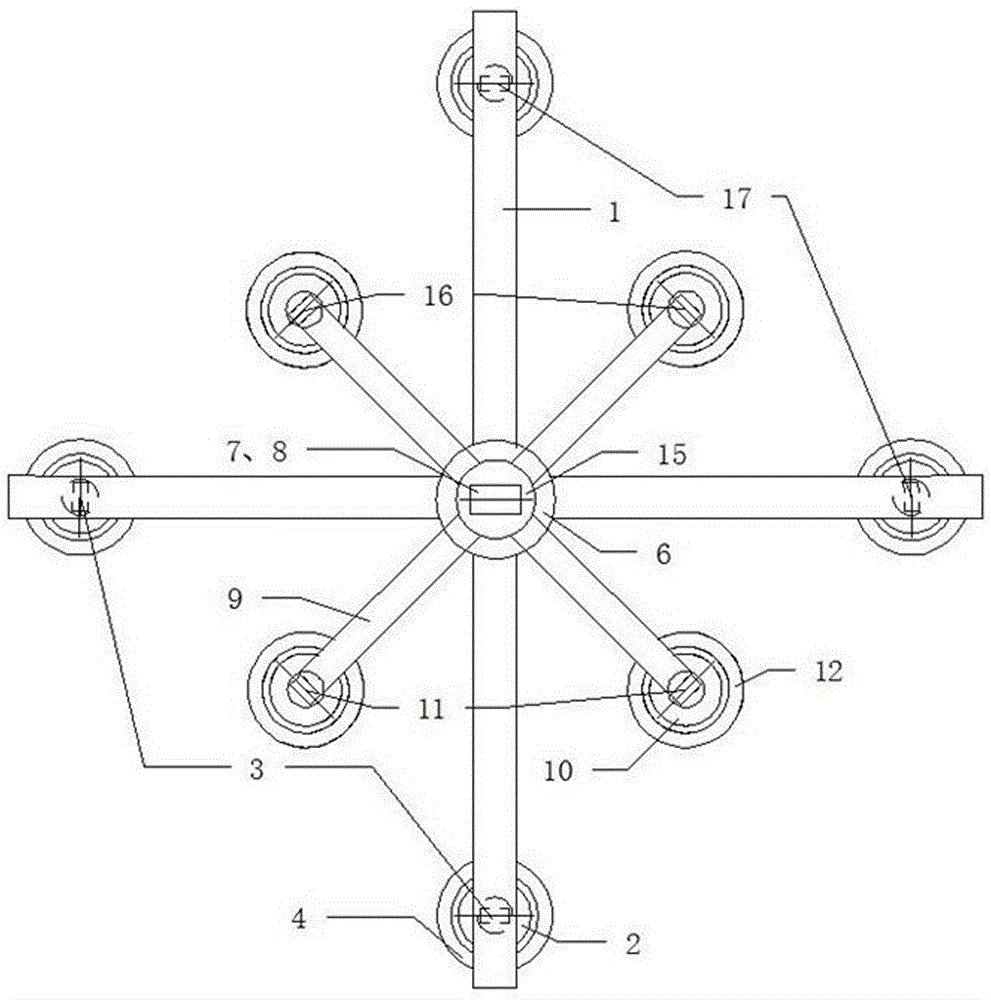
[0029] Such as figure 1 as well as figure 2 As shown, a curved surface joint type wall-climbing robot of the present invention includes a frame and a control system. The frame is divided into an upper frame 1 and a lower frame 9; the lower frame 9 is installed on the upper frame through a hinge structure and a rotating device. The lower end of the central axis of the frame 1; the hinged structure is connected with the rotating device; the hinged structure includes the forearm 15, the first elbow 7, the second elbow 8, the upper arm 13 and the rotating device; the upper end of the forearm 15 is connected with the upper frame 1 , the lower end of the forearm 15 is connected with the upper end of the first elbow 7, the stator of the first elbow 7 is mounted on the forearm 15; the lower end of the first elbow 7 is connected with the upper end of the upper arm 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More