

Folding type climbing device for glass curtain wall cleaning robot
A technology for cleaning robots and glass curtain walls, applied in the field of robots, can solve the problems that affect the beauty of glass curtain walls, clean development space, poor adsorption firmness, complex structure of climbing devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The embodiments of the present invention will be described in detail below with reference to the accompanying drawings, but the present invention can be implemented in many different ways defined and covered by the claims.
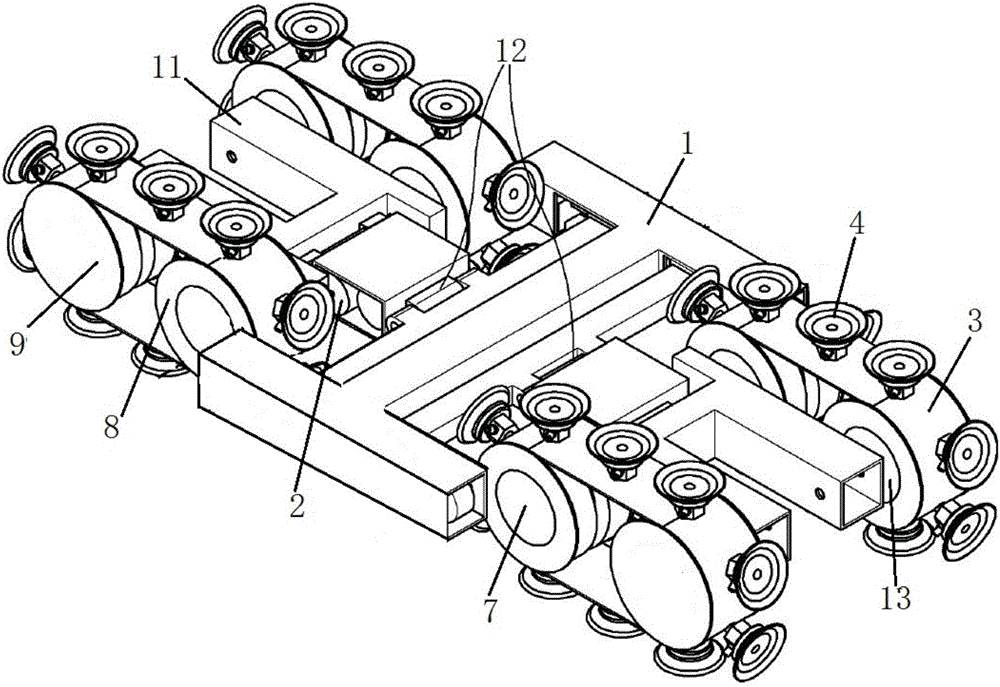
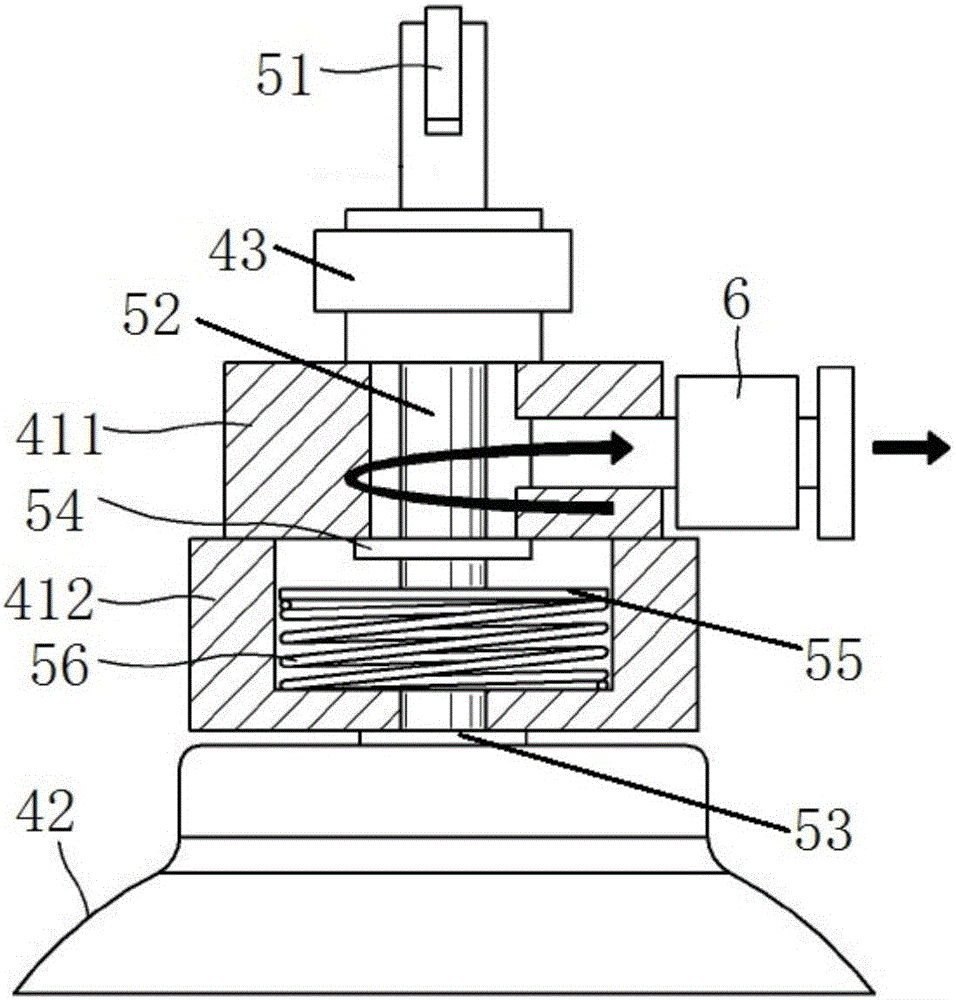
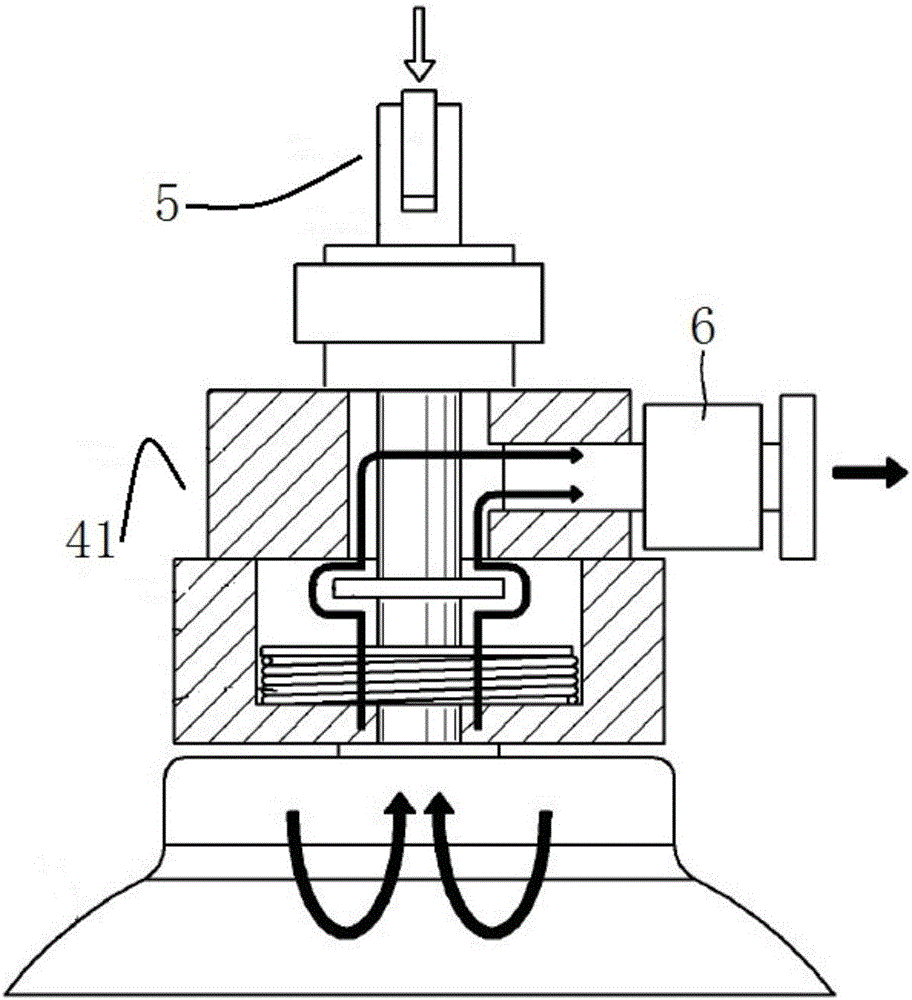
[0024] like Figure 1 to Figure 5 As shown, the present embodiment provides a folding climbing device for a glass curtain wall cleaning robot, which includes a fixed disk 1 with an overall shape of "I" and two movable disks 11 with an overall shape of "H". A shaft coupling 12 is installed on the front side of the crossbeam of the fixed disk 11 and the rear side of the crossbeam, and the two movable disks 11 are installed on the crossbeam of the fixed disk 1 through the coupling 12 and are respectively located at the sides of the fixed disk 1. On the front and back sides, on each movable disc 11, a crawler hub is installed along the left and right directions, and each movable disc 11 is equipped with a drive motor for driving the crawler hub to rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More