

Attitude determination method resisting acceleration interference
A determination method and acceleration technology, which are applied in the direction of navigation through velocity/acceleration measurement, navigation calculation tools, etc., can solve the problems of effective estimation of linear acceleration interference and poor anti-interference effect, so as to weaken the linear acceleration interference of the carrier, improve the accuracy and The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
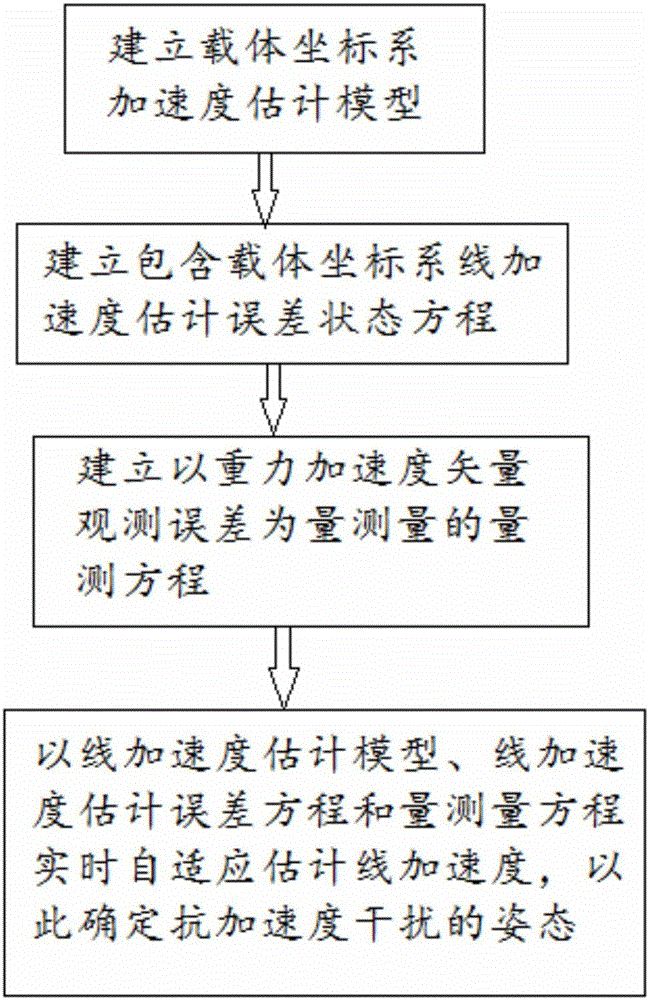
[0021] Such as figure 1 As shown, the present application designs a method for determining the attitude of anti-acceleration interference, and the specific operation principle is as follows:
[0022] 1. Established the linear acceleration estimation model of the carrier coordinate system;
[0023] When the carrier performs acceleration and deceleration maneuvers or in a vibrating environment, the carrier has a linear acceleration, and the change of the linear acceleration under the carrier system can be approximated as a first-order Markov process, as shown in formula (1), where for t k The linear acceleration of the carrier at time, for t k-1 The linear acceleration of the carrier system at time, the superscript B represents the carrier system. τ is the first-order Markov correlation tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More