

Multi-unmanned aerial vehicle traversal search algorithm based on sub-region division
A sub-area division and search algorithm technology, applied in the field of multi-UAV traversal search algorithm, can solve the problems of lower search efficiency, complex segmentation, and failure to achieve the best of the whole area, so as to improve search efficiency, avoid repeated searches, and realize simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below with reference to the accompanying drawings and specific embodiments.
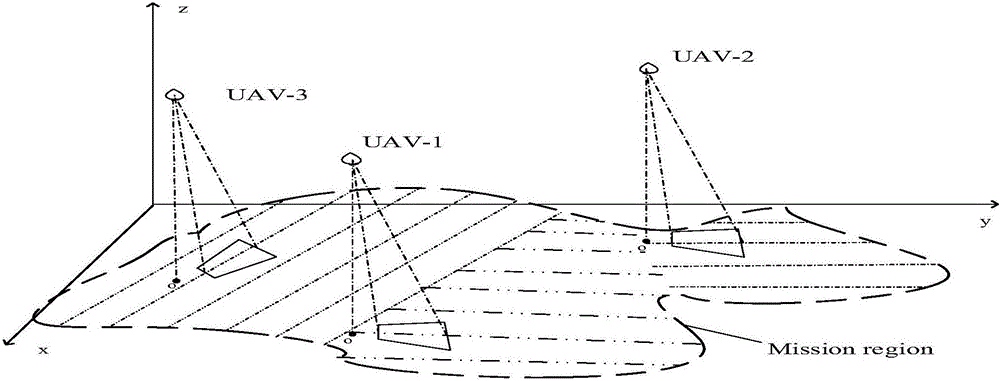
[0046] The existing Boustrophedon division algorithm, Exact Cell Decomposition and Templates matching region division algorithms have certain restrictions on the shape of polygonal regions, and are not suitable for all situations; and based on the sum of the widths of subregions The sub-regions divided by the sub-regional division algorithm have a large difference in shape, which is not conducive to the trajectory planning of the UAV, and the algorithm complexity is high. Therefore, in view of the shortcomings of the above algorithms, this patent proposes a multi-UAV search algorithm based on sub-region division and track length. When the search area is an irregular polygon, the figure 2 As shown in the multi-UAV search diagram as an example, firstly, the entire area is divided into multiple sub-areas with good shape and little difference by us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More