Industrial robot performance measurement method based on laser tracker
A laser tracker, industrial robot technology, applied in the direction of instruments, measuring devices, etc., can solve the problems of long measurement time, complicated operation process, low measurement accuracy, etc., and achieve short measurement time, high measurement accuracy and high technical level requirements Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
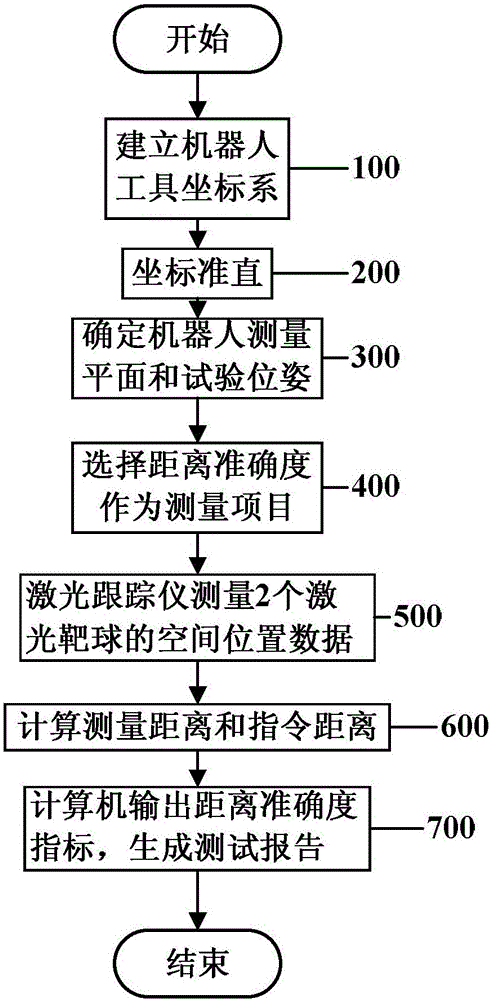
[0058] Such as figure 1 The illustrated embodiment is a method for measuring the performance of an industrial robot based on a laser tracker, including a laser tracker, a computer and a teach pendant located on the robot, and the computer is electrically connected to the laser tracker and the teach pendant respectively; including the following step:
[0059] Step 100, establish robot tool coordinate system
[0060] Fix 5 laser target balls on the fixture at the end of the robot, select one of the target balls as the TCP point, and move the robot to n=8 positions that are not on the same straight line in the motion space in turn, and the posture of the robot at each position are changed;
[0061] The laser tracker measures n sets of position data m(i)=(xm(i), ym(i), zm(i)) of TCP points, i=1, 2,..., n;
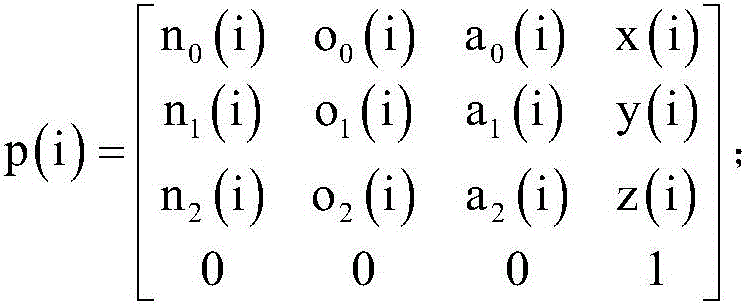
[0062] The computer reads the pose da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More