

A method for real-time monitoring and positioning of AGVs
A real-time monitoring and computer control technology, applied in control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve the problem of not being able to know the real-time position of AGV, so as to ensure reliability and authenticity The effects of high performance, improved sensitivity, and a small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below.
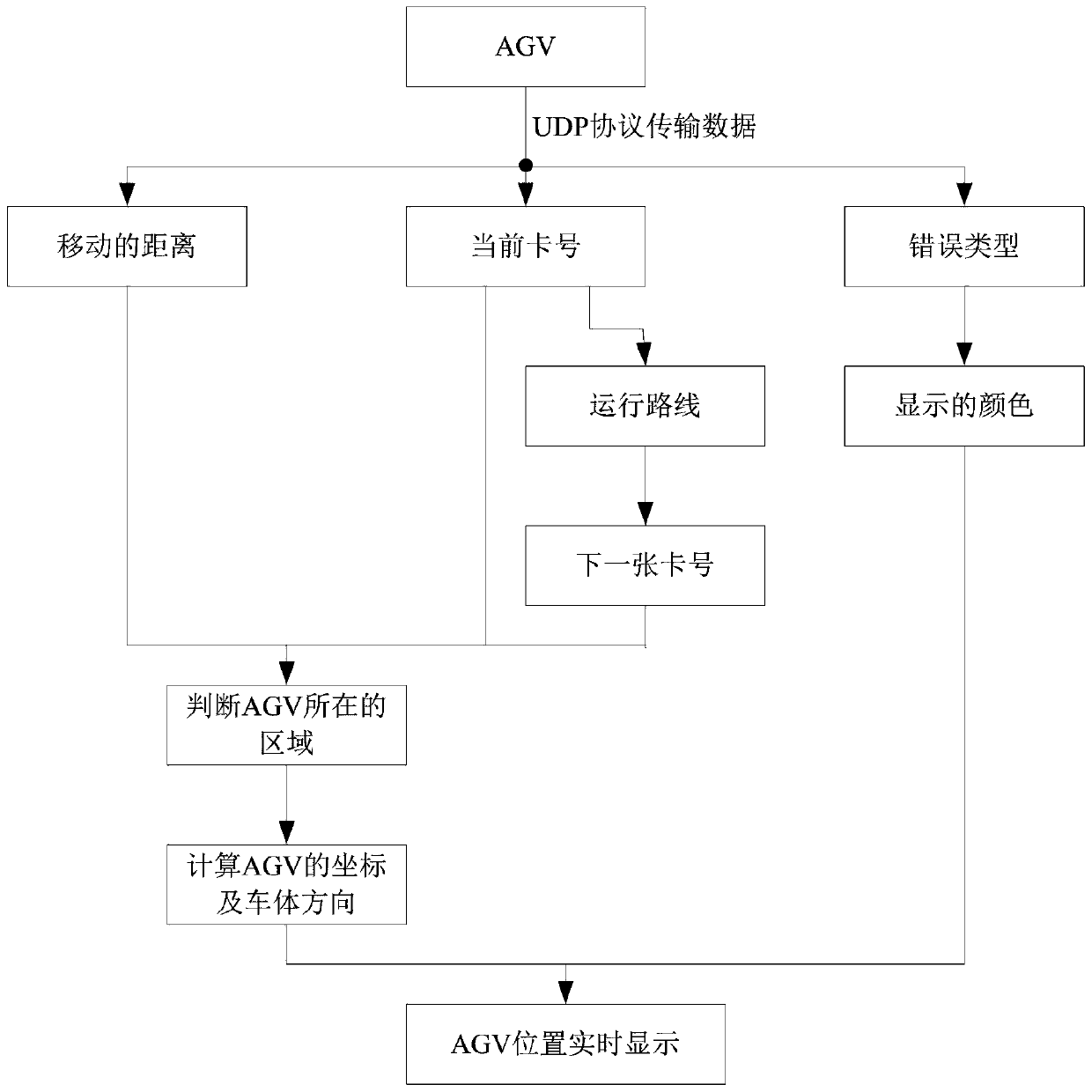
[0032] like Figure 1 to Figure 4 As shown, the present invention is a method for real-time monitoring and positioning of the AGV, and displaying the precise position of the AGV in the monitoring interface can improve the effect of manipulating the AGV. The present invention will be described in further detail below with reference to the accompanying drawings and examples.
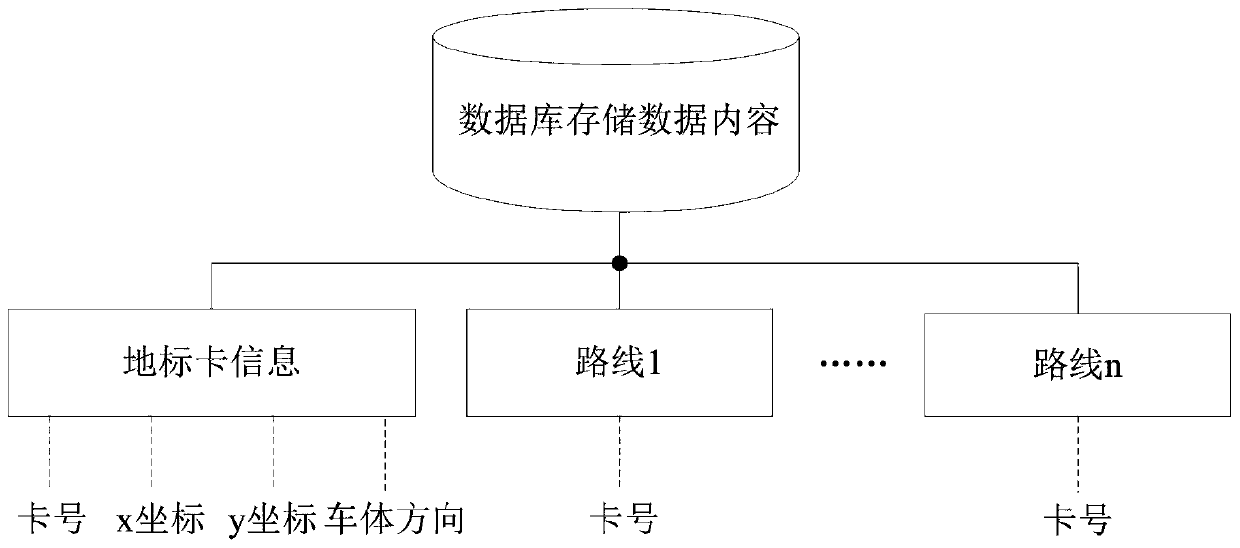
[0033] The first step, refer to figure 2 , it is necessary to store all the landmark card information (card number, x coordinate, y coordinate, AGV body in this position is horizontal or vertical) and the card number contained in each closed loop line in the database in advance In the above, the database can be in .xsl format, .db format or other databases, as long as the control computer can read and write files...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More