Imaging system positioning method and device thereof for human body scanner
A camera system and positioning method technology, applied in the field of three-dimensional scanners, can solve the problems of design position deviation, inaccurate three-dimensional coordinates, easy to cause discomfort of the human body, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
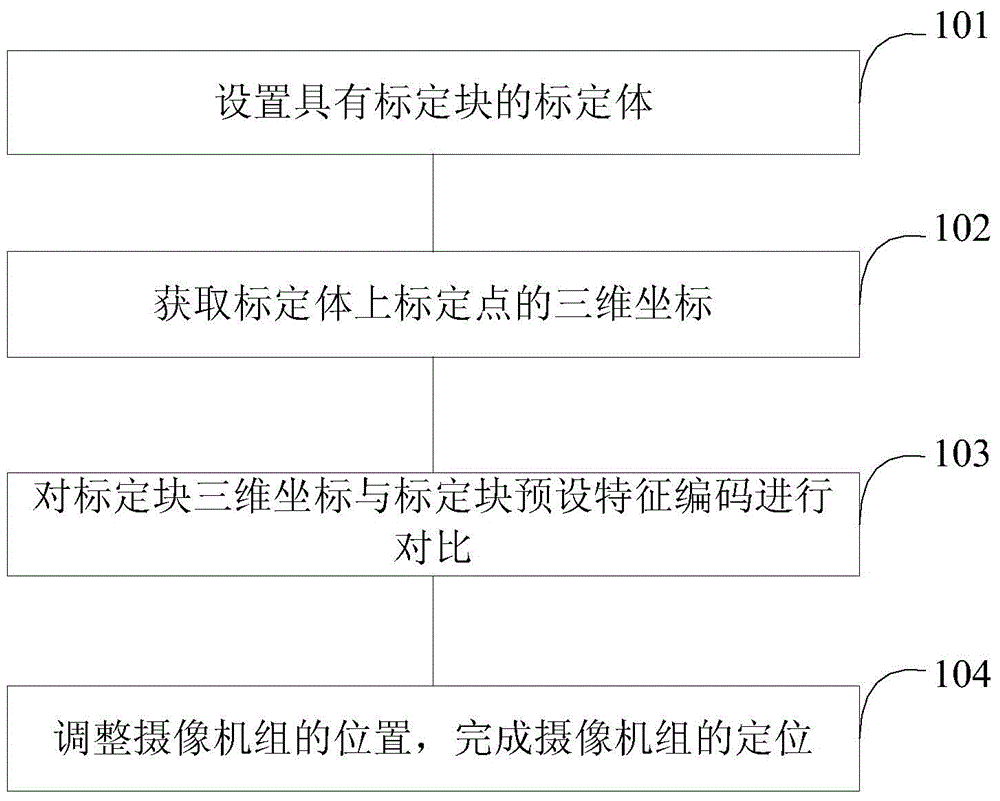
[0033] see figure 1 , is a flow chart of a camera system positioning method of a body scanner proposed by the present invention.
[0034] Such as figure 1 Shown, a camera system positioning method of a body scanner, comprising the following steps:
[0035] Step 101, setting a calibration body with a calibration block;
[0036] Wherein, in step 101, the calibration body is a three-dimensional structure with a calibration block on the surface, and the calibration block is a characteristic pattern with a feature code; the feature code is recorded when the calibration body is in the set position. The real-world three-dimensional coordinates of .
[0037] In the above step 101, the setting of the calibration body with the calibration block is specifically setting the calibration body with the calibration block at the center of the scanning device.
[0038] In the embodiment of the present invention, the calibration body can be a three-dimensional square structure, or a cylindri...
Embodiment 2
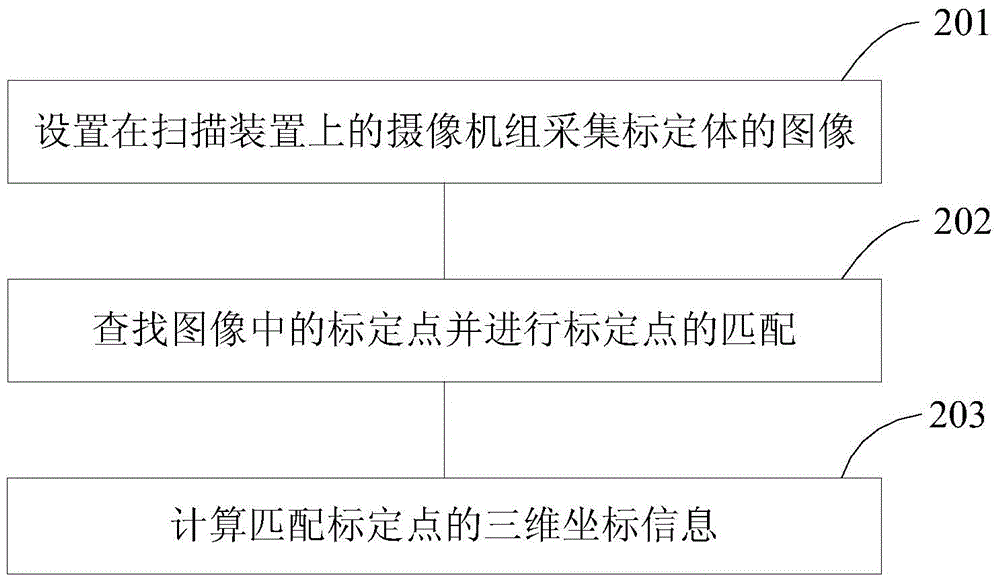
[0053] see figure 2 , is the flow chart of the method for obtaining the three-dimensional coordinates of the calibration block on the calibration body proposed by the present invention.
[0054] In Embodiment 1, the acquisition of the three-dimensional coordinates of the calibration block on the calibration body specifically includes:
[0055] Step 201, the camera group set on the scanning device collects the image of the calibration body;
[0056] In step 201, the camera group on the scanning device is a clustered camera group arranged in all directions at 360 degrees, the calibration body is set at the center of the scanning device, and the clustered camera group performs omnidirectional image acquisition on the calibration body.
[0057] Step 202, searching for the calibration blocks in the image and matching the calibration blocks;
[0058] In step 202, search and extract the marked blocks from the images collected by the camera group, and match the marked blocks.
[0...
Embodiment 3
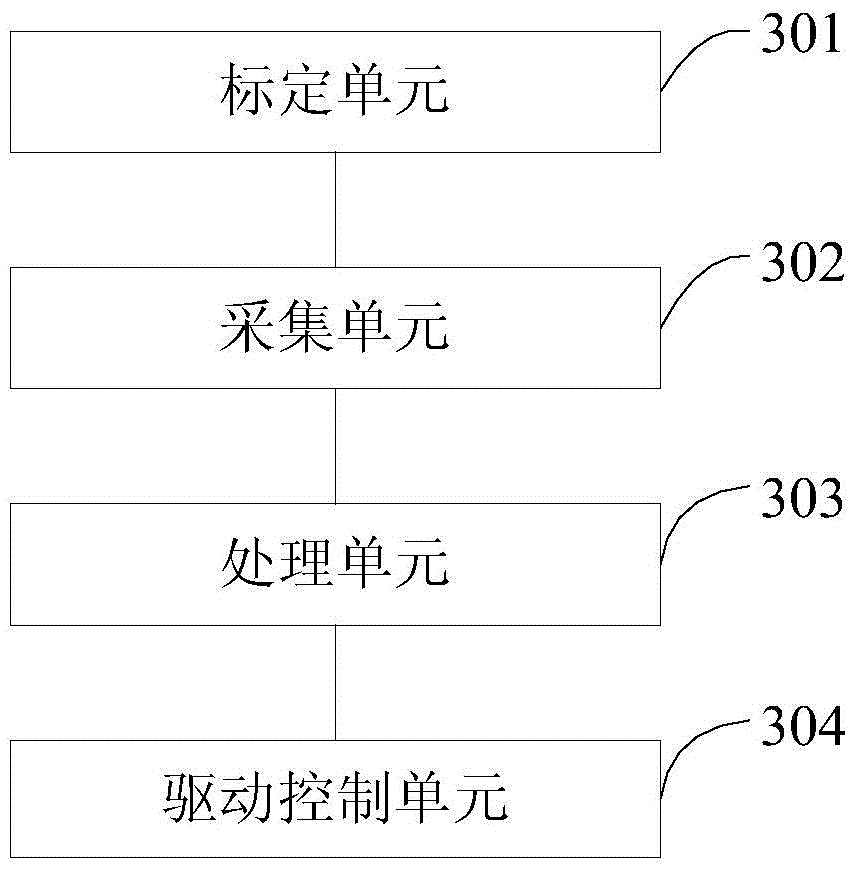
[0064] see image 3 , is a structural diagram of a camera system positioning device of a body scanner proposed by the present invention.
[0065] A positioning device of a camera system of a body scanner, comprising:
[0066] A calibration unit 301, configured to provide calibration reference information;
[0067] An acquisition unit 302, configured to acquire a calibration volume image having a calibration block;
[0068] The processing unit 303 extracts and matches the calibration blocks from the calibration volume image collected by the acquisition unit, calculates the three-dimensional coordinates of the calibration blocks, and compares the three-dimensional coordinates with the preset three-dimensional coordinate values corresponding to the feature codes of the calibration blocks, Generate control commands for the camera group;
[0069] The drive control unit 304 receives a control command from the processing unit to the camera group, and controls the controller of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com