

Fire-fighting and rescue robot system and control method
A technology for rescue robots and fire-fighting robots, which is applied in the field of fire-fighting and rescue robot systems and controls, can solve problems such as difficulty and missed rescue time, and achieve the effect of improving work efficiency and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The technical scheme of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
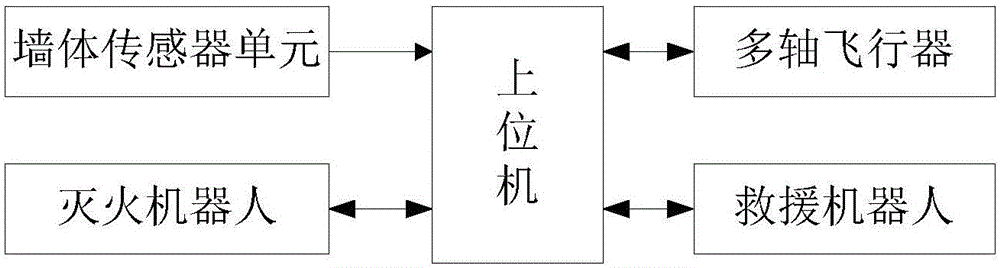
[0028] Such as figure 1 As shown, a fire-fighting and rescue robot system includes a host computer, and a fire-fighting robot, a rescue robot, a multi-axis aircraft and a wall sensor unit for information interaction with the host computer respectively, and the wall sensor unit includes a flame sensor, a flammability Gas sensor, infrared temperature sensor and Doppler displacement sensor. Among them, the fire extinguishing robot, rescue robot and wall sensor unit are responsible for environmental monitoring and fire fighting and rescue inside the building, and the multi-axis aircraft is responsible for image capture outside the building.
[0029] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More