

Fixed camera calibration method
A technology of fixing camera and calibration method, applied in electrical components, printed circuit manufacturing, electrical components, etc., can solve problems such as large errors, and achieve the effect of improving accuracy and improving placement effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
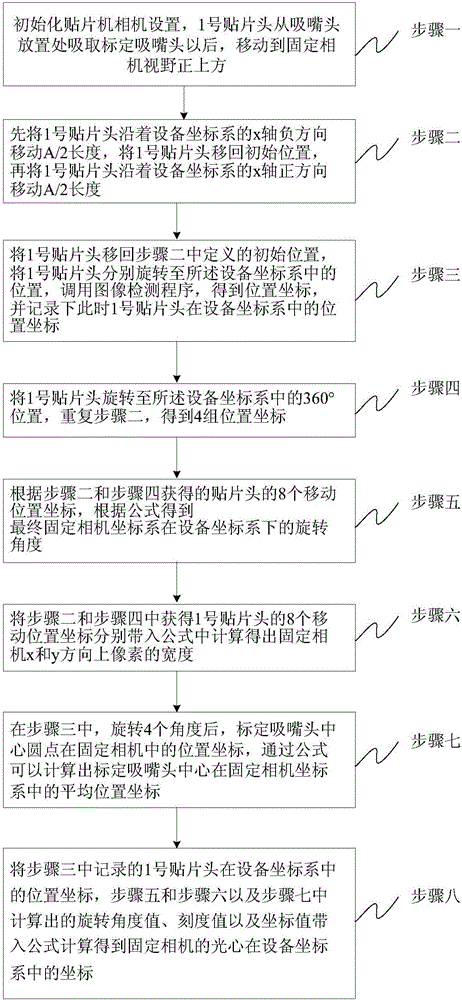
[0042] A method for calibrating a fixed camera in this embodiment is implemented through the following steps:
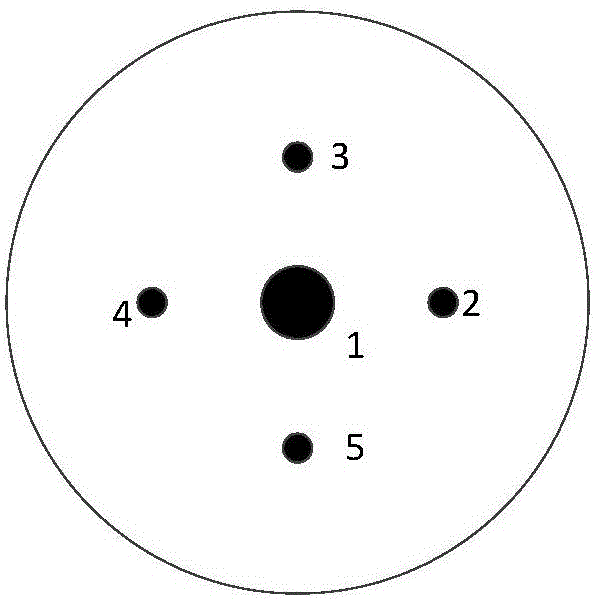
[0043]Step 1: Initialize the camera settings of the placement machine, set the moving length A of the placement head when the fixed camera is calibrated, the unit is mm, after the No. 1 placement head sucks the calibration nozzle head from the ANC nozzle head slot, moves to the fixed camera field of view. Just above, calibrate The target is to calibrate the nozzle tip; ANC stands for the nozzle tip groove.
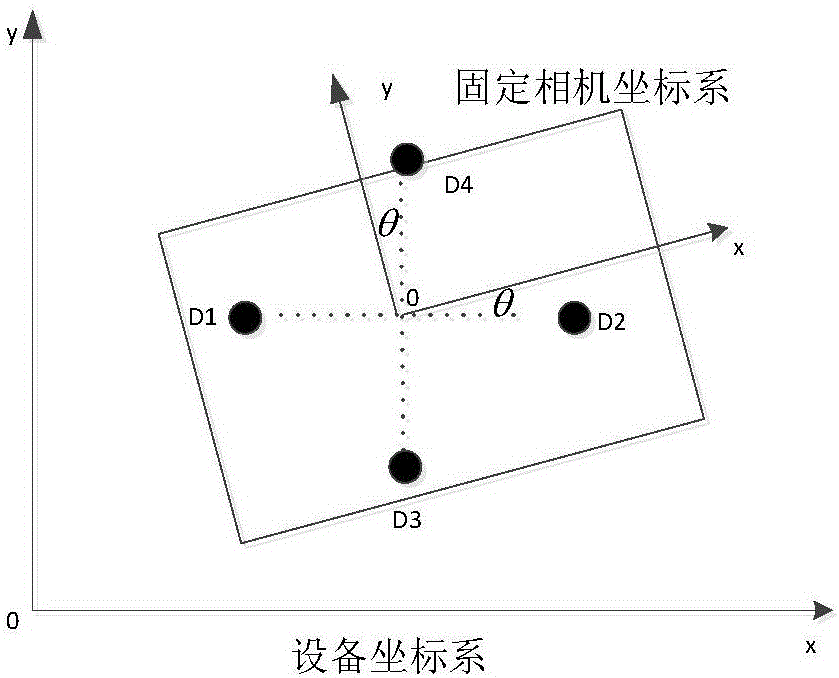
[0044] Step 2: Set the position of the No. 1 patch head in the device coordinate system as the initial position at this moment, first move the No. 1 patch head along the negative direction of the x-axis of the device coordinate system by A / 2 length, and then call the image detection program to get Calibrate the position coordinates of the center of the nozzle head in the fixed camera, marked as D1(x 1 ,y 1 ); then move the No. 1 placement head back to the initi...
specific Embodiment approach 2
[0062] Different from the specific embodiment one, step one is specifically:
[0063] Step 11: Click the function button used for patching the fixed camera, and read the moving length A of the fixed camera according to the prompts on the image interface;
[0064] Step 1 and 2: Place all nozzles according to the prompts on the graphical interface;
[0065] Step 1 and 3: Control the hardware to obtain the calibration nozzle head from the place where the nozzle head is placed, and move the No. 1 placement head to the position of the fixed camera center field of view according to the graphical interface prompt of the placement machine;
[0066] Step 14: Control the No. 1 placement head to move above the center of the fixed camera.
[0067] The specific operation of this embodiment can be as follows:
[0068] 1) Click the button in the placement machine to prompt to place the nozzle. Read the moving length of the fixed camera from the "Fixed Camera" control in the "Moving Lengt...
specific Embodiment approach 3
[0074] Different from the specific embodiment one or two, step two is specifically:
[0075] Step 21: Move the No. 1 patch head along the x-axis by -A / 2, and set the coordinates of the No. 1 patch head relative to the fixed camera optical center at this time as D(x,y)=(-A / 2,0), unit mm;
[0076] Step 22: Input the image captured by the fixed camera at this time into the image detection program to obtain the position D of the center point of the calibration nozzle head in the fixed camera 1 (x 1 ,y 1 ), the unit is pixel;
[0077] Step 23: Move the No. 1 patch head along the x-axis by A. At this time, the coordinate of the No. 1 patch head relative to the optical center of the fixed camera is (A / 2,0), and the image captured by the fixed camera at this time is input to the image detection Program to get the position D of the center of the circle in the fixed camera 2 (x 2 ,y 2 ), unit pixel;
[0078] Step 24: Move the No. 1 patch head along the x-axis by -A / 2, and move a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More