

Mechanical arm fractional order iterative learning control method and system with initial state learning function
An iterative learning control and control system technology, which is applied in the field of fractional-order iterative learning control methods and systems for robotic arms, and can solve the problems of initial positioning error of the robot in the initial state, reducing the tracking accuracy, and large error between the tracking trajectory and the expected trajectory. Fast and accurate task tracking, fast convergence speed, and improved performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
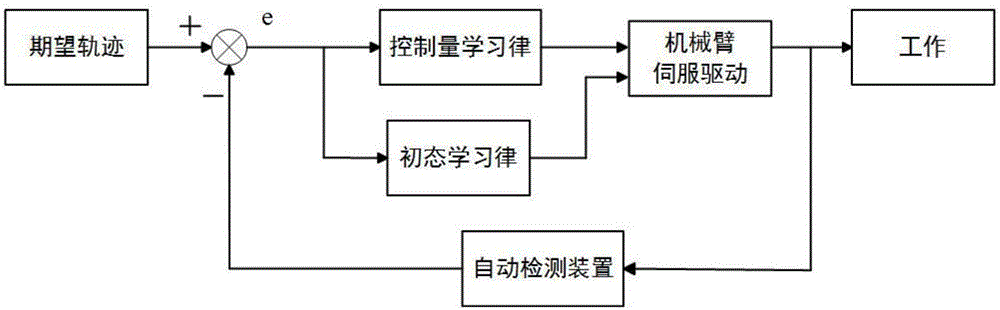
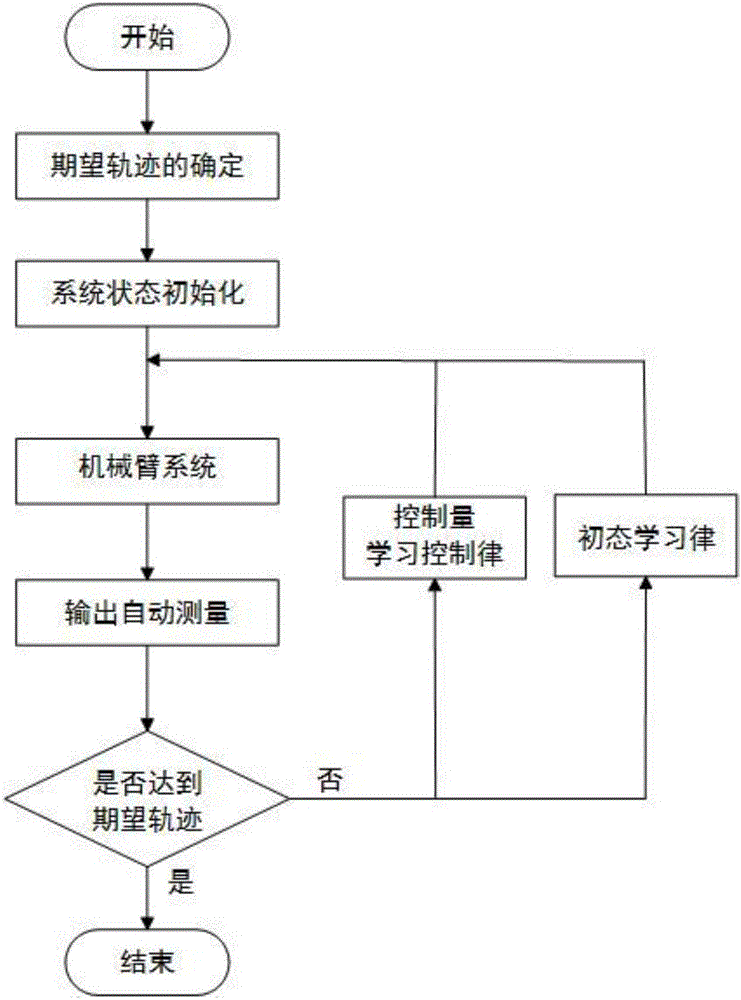
[0037] Such as figure 1 with figure 2 As shown, the fractional iterative learning control method of a mechanical arm with initial state learning of the present invention includes:
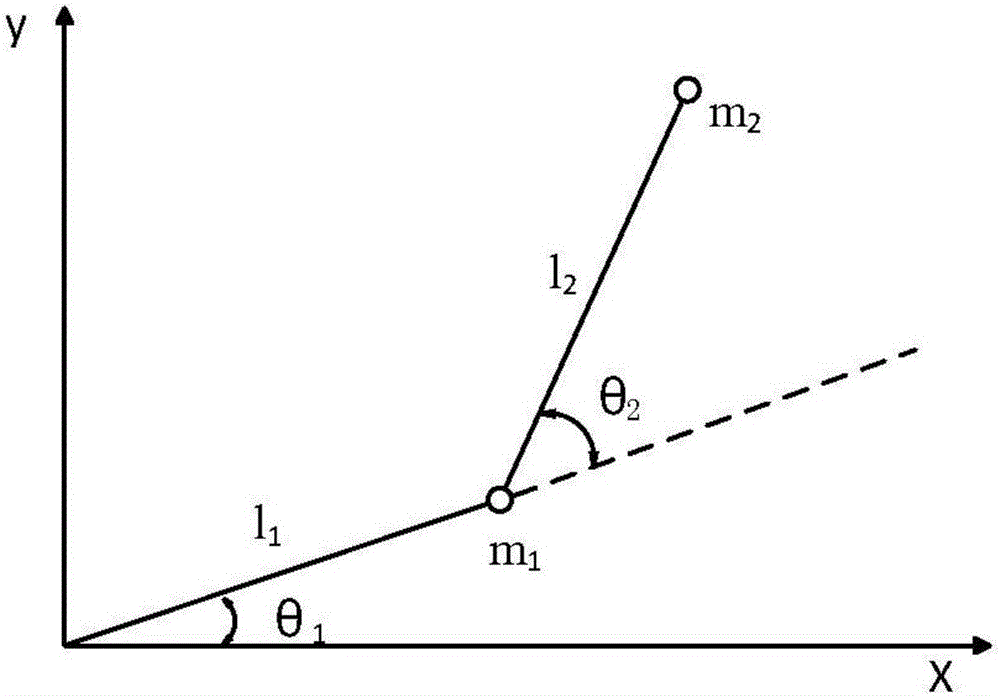
[0038] Step 1: Establish a dynamic model of the robotic arm system and preset the expected motion trajectory of the robotic arm system;
[0039] Step 2: Initialize the initial state and system input of the state quantity of the robot arm system, and obtain the actual motion trajectory of the robot arm system according to the dynamic model of the robot arm system;
[0040] Step 3: Calculate and judge whether the tracking error between the actual motion trajectory and the expected motion trajectory is zero. If the tracking error is zero, the actual motion trajectory coincides with the expected motion trajectory and ends; otherwise, go to the next step;
[0041] Step 4: Correct the initial state of the state quantity of the manipulator system according to the initial state of the tracking error and the set in...
Embodiment 2
[0084] The present invention also provides a robotic arm control system. The robotic arm control system includes: a controller, the application of which is figure 2 The mechanical arm fractional-order iterative learning control method with initial state learning is shown to control the movement of the mechanical arm driving mechanism;
[0085] The robotic arm drive mechanism is connected to the robotic arm system, and the robotic arm drive mechanism is used to drive the robotic arm system to move under the control of the controller.
[0086] Among them, the mechanical arm drive mechanism is a drive motor.
[0087] The mechanical arm system includes a mechanical arm, the mechanical arm is connected with a joint, and the mechanical arm is connected with a mechanical arm driving mechanism, and moves around the joint under the action of a controller.
[0088] The robotic arm system is an n-degree-of-freedom robotic arm system, where n is a positive integer.
[0089] The robotic arm control...
Embodiment 3
[0091] The present invention also provides a robot, which includes a robot body and a robot arm system, and the robot arm system is connected to the robot arm control system shown in Embodiment 2.
[0092] Both the robot body and the mechanical arm system are existing structures, and will not be repeated here.
[0093] The robot in this embodiment uses fractional-order iterative learning to control the robotic arm system, and does not require precise description of the robotic arm system. It can automatically adjust undesirable input signals to control the robotic arm system based on previous operating data, so that the robotic arm system The performance of the robot can be improved; and the present invention has a faster convergence speed and better robustness in the control effect, and finally enables the mechanical arm to quickly and accurately realize the tracking task.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More