

Three-freedom-degree robot
A technology of robot and degree of freedom, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unsatisfactory effect, inflexible rotation, large space occupation, etc., and achieve compact structure, high flexibility, and stable movement Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
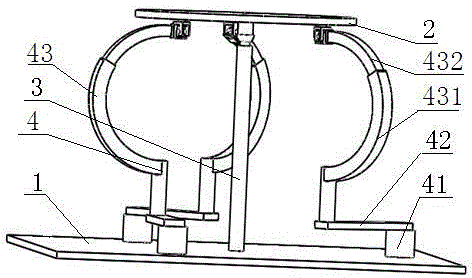
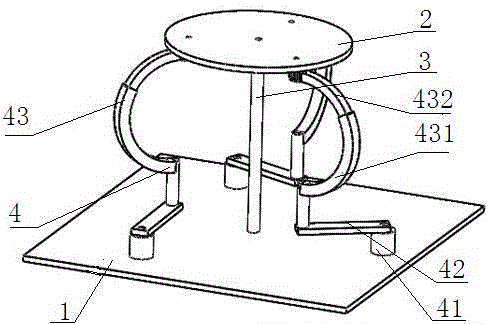
[0015] Such as figure 1 and 2 As shown, this embodiment includes a fixed platform 1, a moving platform 2, an intermediate restraint rod 3 and three branch chains 4 with the same structure, the upper end of the intermediate restraint rod 3 is hinged with the center of the movable platform 2 through a ball joint, and the lower end is connected with the fixed platform 1 The center is fixedly connected, and the branch chain 4 includes a driving device 41, a driving connecting rod 42, and a rotating telescopic mechanism 43. Fixed on the fixed platform 1, one end of the drive link 42 is connected to the output shaft of the driving device 41 to form a rotating pair, and the other end is connected to the lower end of the rotating telescopic mechanism 43 to form a rotating pair. The upper end of the rotating telescopic mechanism 43 passes thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More