

Robot arm joint controlled through wire pulling method
A technology of robot arm and wire drawing method, which is applied in the field of automation and can solve problems such as small moving range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
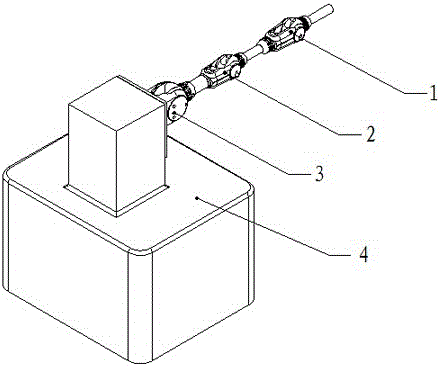
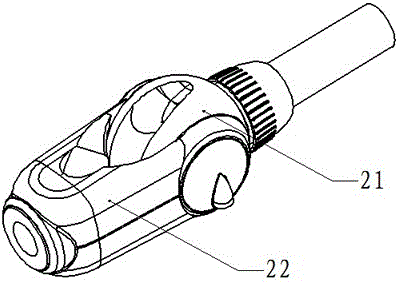
[0018] A robot arm joint controlled by a wire drawing method, comprising: a first articulated arm 1, a second articulated arm 2 connected to the first articulated arm 1, a third articulated base 3 connected to the second articulated arm 2, connected to The third articulated base 3 and the drive control box 4 that drives the first articulated arm 1 , the second articulated arm 2 , and the third articulated base 3 to perform cable-drawing motion through forward and reverse winding. The drive control box 4 consists of: a motor for controlling the movement of each joint of the robot arm, and a driver connected between the motor and the fixed main base 32 .
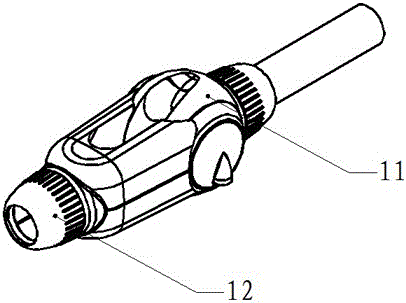
[0019] The first articulated arm 1 is composed of: a swivel joint 11 connected to a stay wire, and a first joint swing main rod 12 for the stay wire to pass through and connected between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More