Takeoff and landing system and method for fixed-wing unmanned aerial vehicle
A multi-rotor unmanned aerial vehicle and unmanned aerial vehicle technology, which is applied in the direction of unmanned aircraft, motor vehicles, aircraft, etc., can solve the problems of troublesome carrying, immature technology, complicated operation, etc., and achieve flexible take-off and landing, and reduce The effect of using cost and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
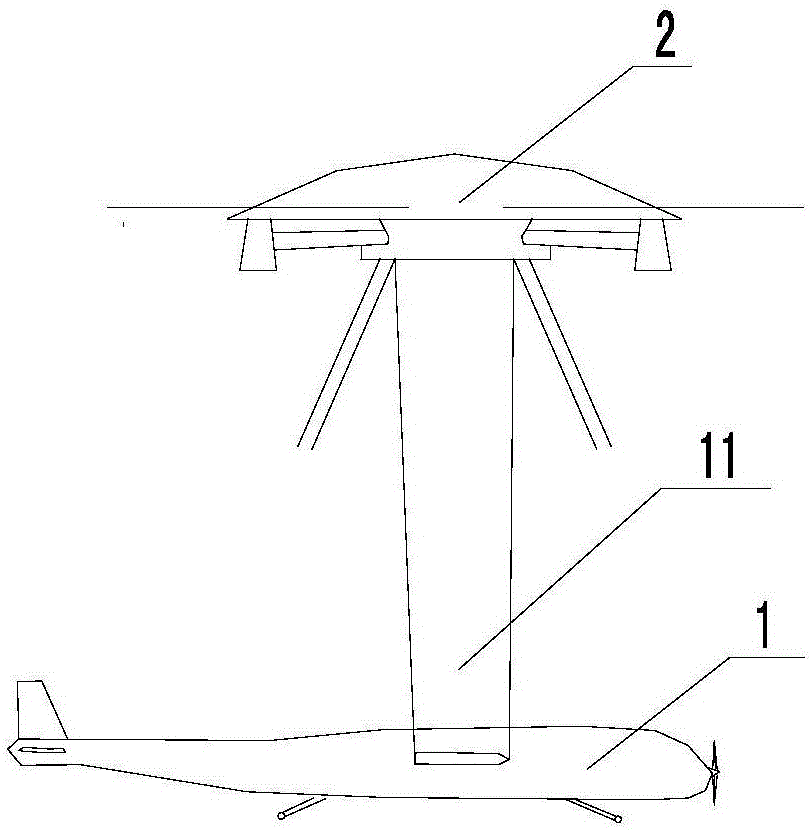
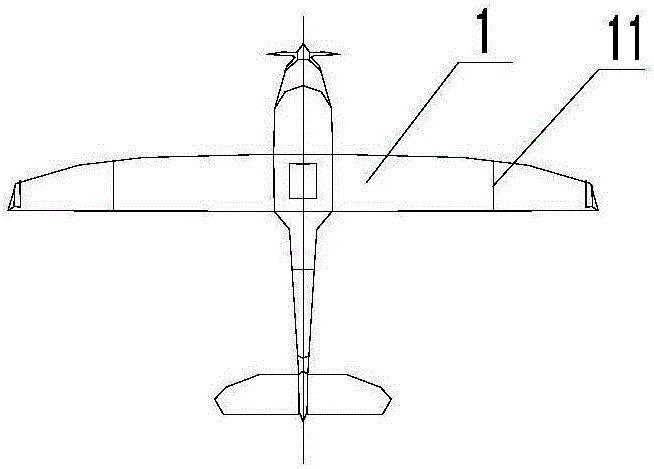
[0025] The invention provides a take-off and landing system for a fixed-wing unmanned aerial vehicle, such as Figure 1-2 As shown, it includes: a fixed-wing drone 1 and two multi-rotor drones 2, the fixed-wing drone 1 and the multi-rotor drone 2 are connected by a detachable connector, and the fixed The wings on both sides of the wing UAV are respectively provided with extension shafts 11 parallel to the central axis of the fuselage. The detachable connectors include protrusions arranged on the extension shafts 11. The protrusions are respectively provided, and mechanical grippers corresponding to the protrusions are evenly distributed below the multi-rotor UAV 2 with the center of gravity as the base point, so as to facilitate grasping by the grippers. The gripper is connected with the servo, and is controlled by the servo to close or open.
[0026] Through the detachable connector controlled by the server, when the fixed-wing UAV 1 takes off, two multi-rotor UAVs 2 take of...
Embodiment 2
[0032] The difference from Embodiment 1 is that the detachable connector includes a first electromagnetic part and a second electromagnetic part respectively arranged on the fixed-wing drone and the multi-rotor drone, and the first electromagnetic part and the second electromagnetic part The components are attracted to each other, and the magnetism of the first electromagnetic component and / or the second electromagnetic component is controlled by a servo. At least one of the first electromagnetic part and the second electromagnetic part is an electromagnet, and the other can be an electromagnet, or can be a metal that can be attracted by the electromagnet.
[0033] The detachable assembly composed of the first magnetic part and the second magnetic part, when connecting the fixed-wing drone and the multi-rotor drone, the alignment is more accurate, the connection is more convenient, and the servo operation is reduced. Difficulty; when separating the fixed-wing UAV 1 and the mul...
Embodiment 3
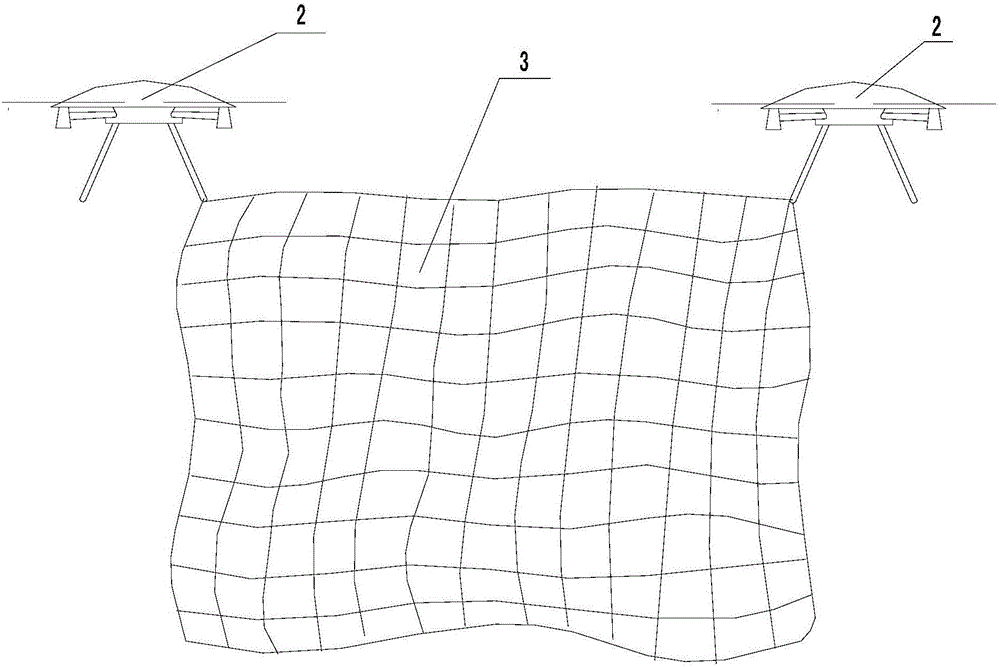
[0038] Different from Embodiment 1 and Embodiment 2, the take-off and landing system of the fixed-wing UAV also includes an interception net 3, such as Figure 1-3 As shown, the intercepting net 3 is arranged between at least two multi-rotor UAVs 2, and the edge of the intercepting net 3 is provided with a drawstring that can be pulled and retracted by the server. The setting of the intercepting net 3 solves the problem of high difficulty in connecting the fixed-wing UAV 1 and the multi-rotor UAV 2 that are in flight through detachable components when landing. The setting makes the landing method of the fixed-wing UAV 1 simpler and easier to operate.
[0039] Also provided is a method for take-off and landing of a fixed-wing UAV, in which the multi-rotor UAV 2 is detachably connected to the fixed-wing UAV 1 through a detachable connector, and the multi-rotor UAV 2 drives the fixed-wing UAV The UAV 1 takes off and accelerates in the air. When the fixed-wing UAV 1 rotates to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com