

Maneuvering extended target tracking method based on unscented Kalman filter
An unscented Kalman and extended target technology, which is applied in the field of maneuvering extended target tracking based on unscented Kalman filtering, and can solve problems such as difficulty in tracking maneuvering extended targets.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
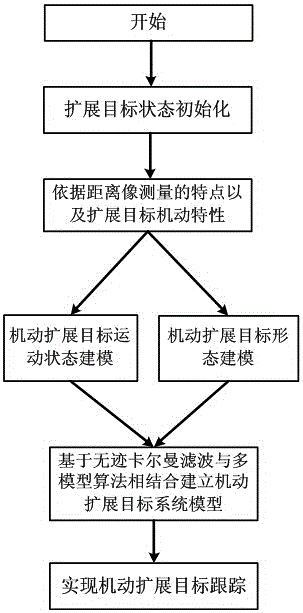
[0039] As shown in the figure, a maneuvering extended target tracking method based on unscented Kalman filter includes the following steps:
[0040] Step 1. Initialize the extended target motion state and extended shape parameters;
[0041] Step 2, the process of establishing the form of the maneuvering extended target by using the support function according to the characteristics of the extended target range image measurement;
[0042] Step 3. According to the maneuvering characteristics of the extended target, use the support function to jointly model the motion state and the extended form of the extended target to accurately describe each maneuvering mode;
[0043] Step 4. Based on the combination of unscented Kalman filter and multi-model algorithm, the model set of the maneuvering extended target system is established, so as to realize the joint tracking of the moving state and the extended form of the maneuvering extended target.
[0044] Assume that the state vector of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More