

MB-RRT-based unmanned aerial vehicle two-dimensional track planning method
A technology for trajectory planning and unmanned aerial vehicles, which is applied in two-dimensional position/channel control, non-electric variable control, instruments, etc., and can solve the problems of large memory footprint, poor practicability, and small memory footprint.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the accompanying drawings.
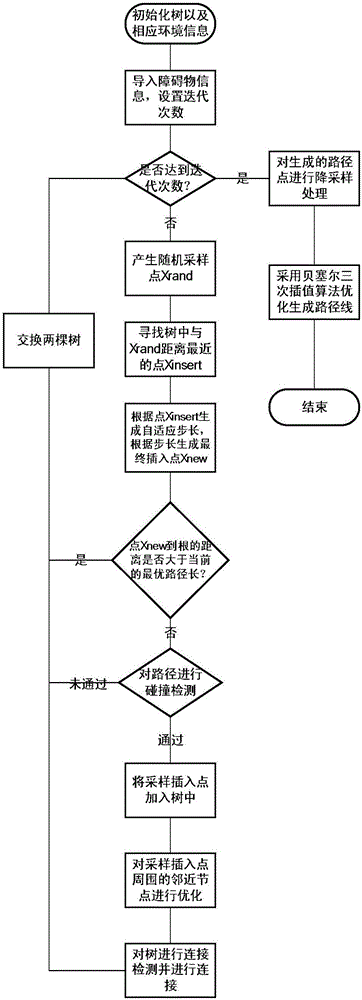
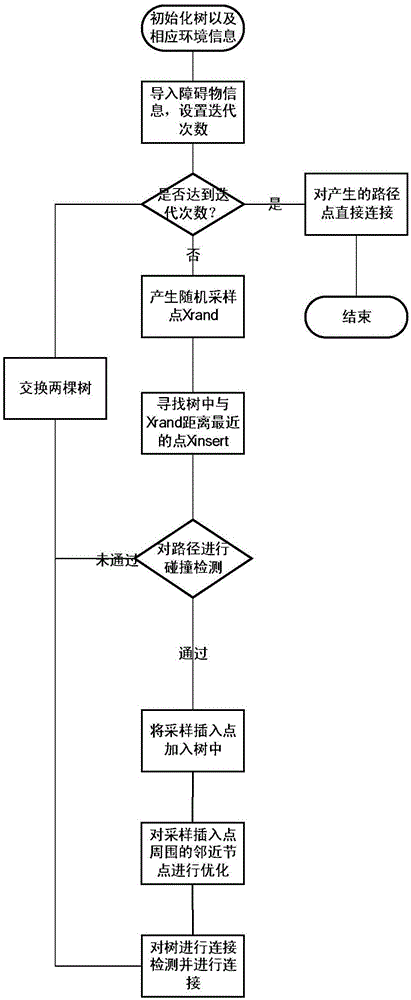
[0061] refer to Figure 1 to Figure 10 , a method for two-dimensional trajectory planning of UAV based on MB-RRT*, including the following steps:
[0062] 1) Initialize tree and environment information;
[0063] 2) Import obstacle information and set the number of iterations;
[0064] 3) Judging whether the number of iterations has been reached, if so, down-sampling the generated path points, and adopting an interpolation algorithm to optimize the generated path line, and ending; otherwise, enter 4);
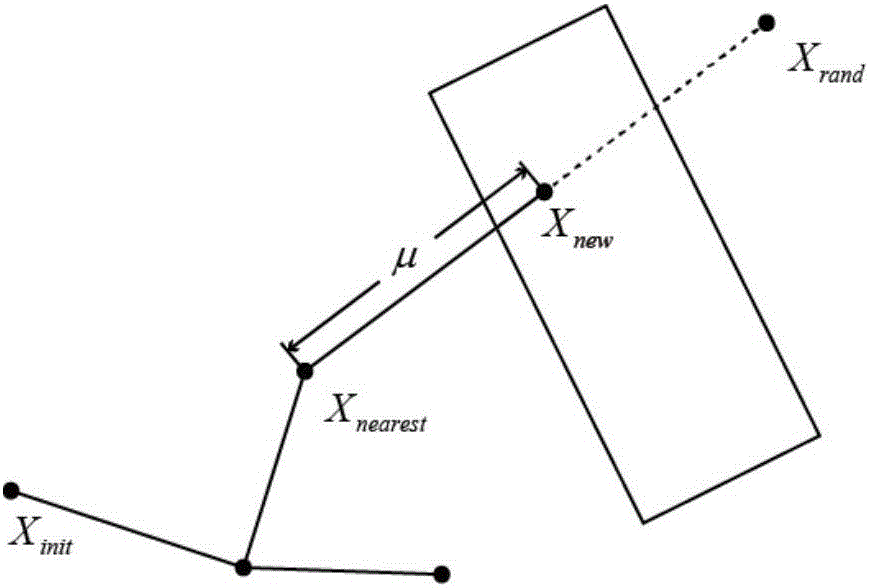
[0065] 4) Generate a random sampling point Xrand, and find the point Xinsert closest to the random sampling point Xrand in the tree;
[0066] 5) Generate an adaptive step size according to the point Xinsert, and generate the final insertion point Xnew according to the step size;
[0067] 6) Judging whether the distance from the insertion point Xnew to the root of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More