

Unpowered wearable auxiliary walking assisting mechanism
A technology of assisting walking and power-assisted mechanism, which is applied in the direction of appliances to help people walk, physical therapy, etc., can solve the problems of large inertia, large volume and weight, and laborious walking of rigid mechanisms, and achieve small inertia, small size, and light weight of the mechanism. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and specific examples of implementation, but not as a limitation of the present invention.
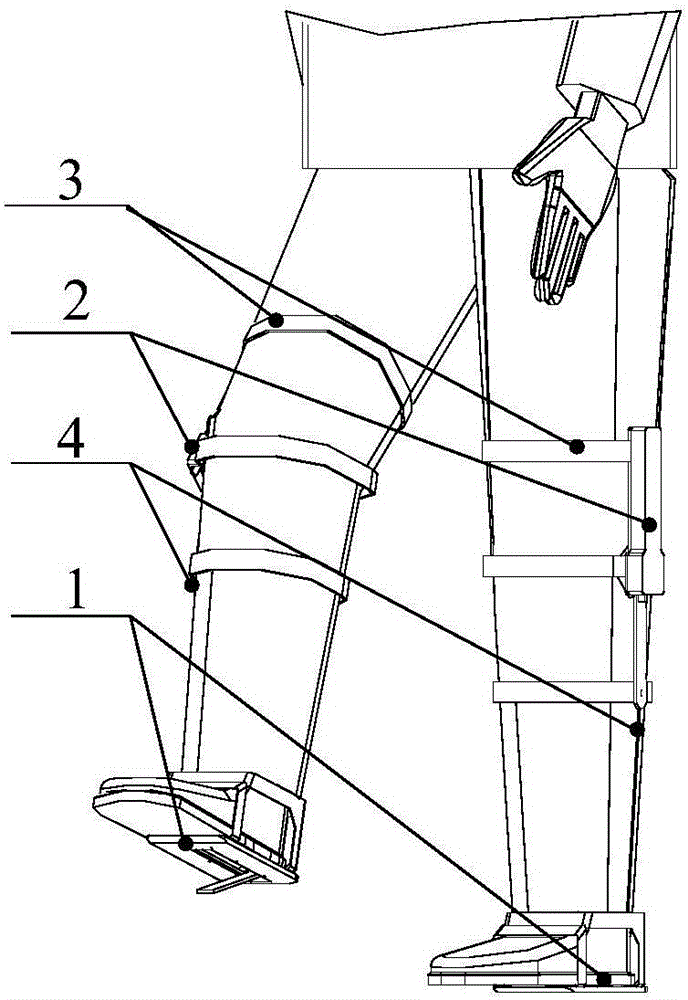
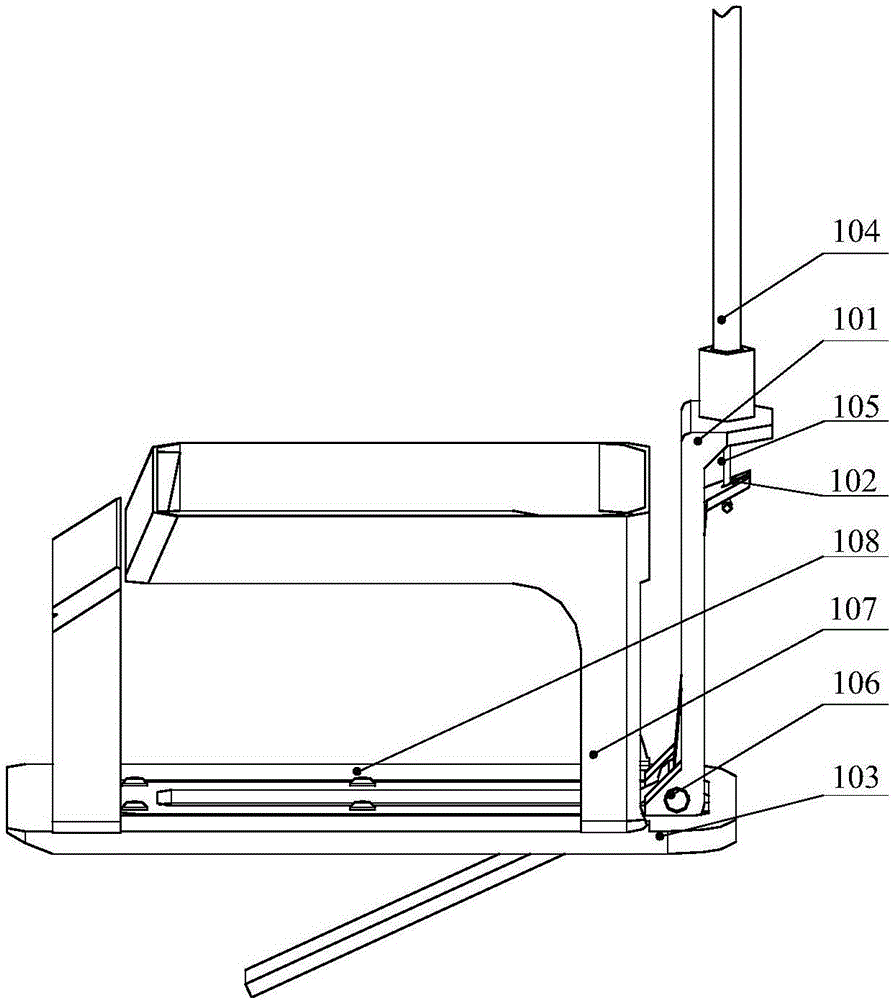
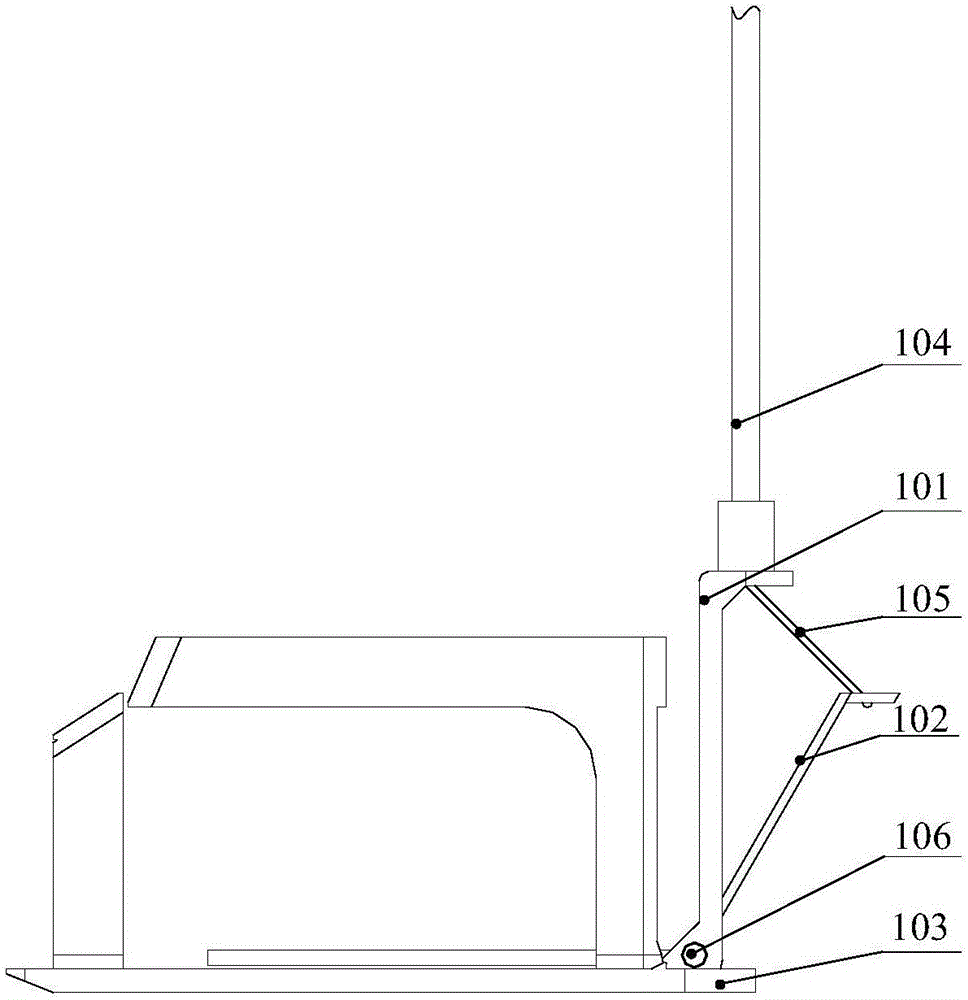
[0034] Such as figure 1 As shown, a non-powered wearable auxiliary walking assist mechanism is driven by the body's own weight and does not require other external power and energy input. The mechanism is mainly composed of a driving force forming component 1, a knee joint assisting actuator component 2, a flexible fixing belt 3, a Bowden rope and its casing 4, and the like. The driving force forming component 1 is respectively fastened under the left and right feet. The knee joint power-assisted actuator component 2 is fixed at the corresponding positions of the thigh, calf and knee joint through the flexible fixing belt 3. The driving force forming component 1 under the left foot is connected with the knee of the left leg. Bowden ropes are used to transmit tension between the jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More