

Operation road surface detection system and method for automatic guided vehicle
An automatic guided vehicle and road surface detection technology, which is applied in two-dimensional position/channel control and other directions, can solve the problems of inaccurate detection of ground trenches and limited application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
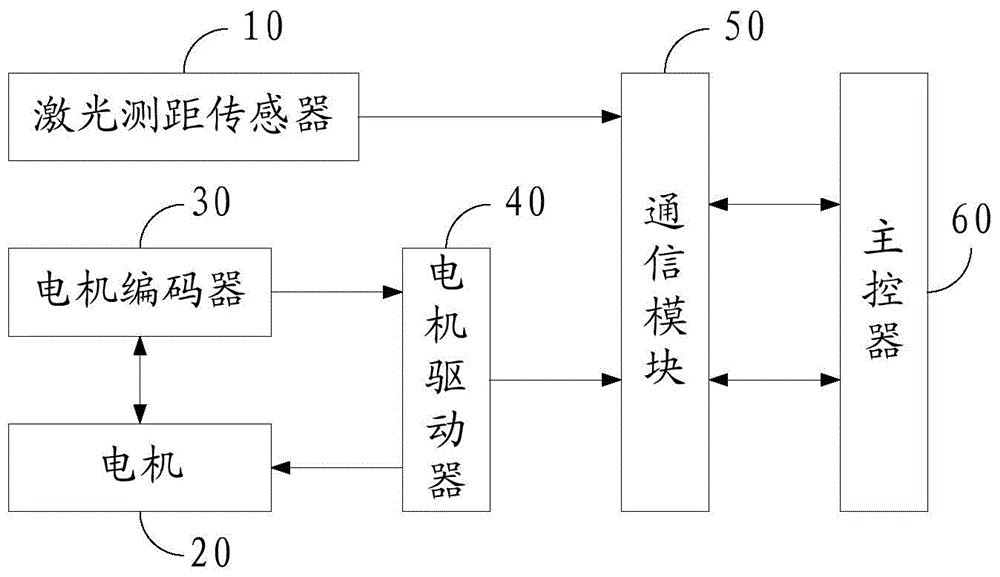
[0055] figure 1 It is a basic structural block diagram of an automatic guided vehicle running road surface detection system provided by an embodiment of the present invention.
[0056] Such as figure 1 As shown, the running road surface detection system for running an automatic guided vehicle provided by the embodiment of the present invention includes a laser ranging sensor 10, a motor encoder 30 connected with the motor 20 of the automatic guided vehicle, and a motor encoder 30 connected with the motor 20 of the automatic guided vehicle. The motor driver 40 connected with the motor encoder 30, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More