

System and method for avoiding collision and obstacle for a driverless bus
An unmanned and bus technology, applied in the field of obstacle avoidance systems, can solve problems such as easy damage and insufficient unmanned buses, so as to reduce the incidence of accidents, improve the performance of collision avoidance and obstacle avoidance, and improve safe driving. performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
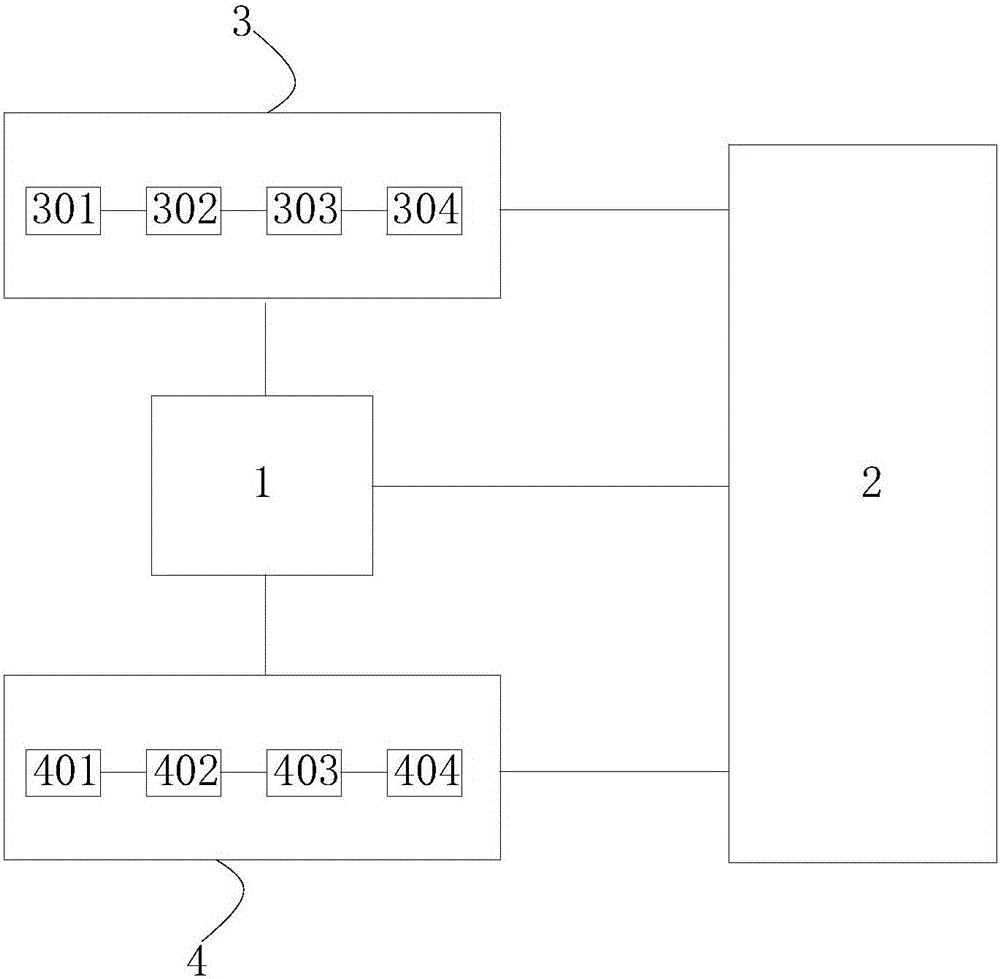
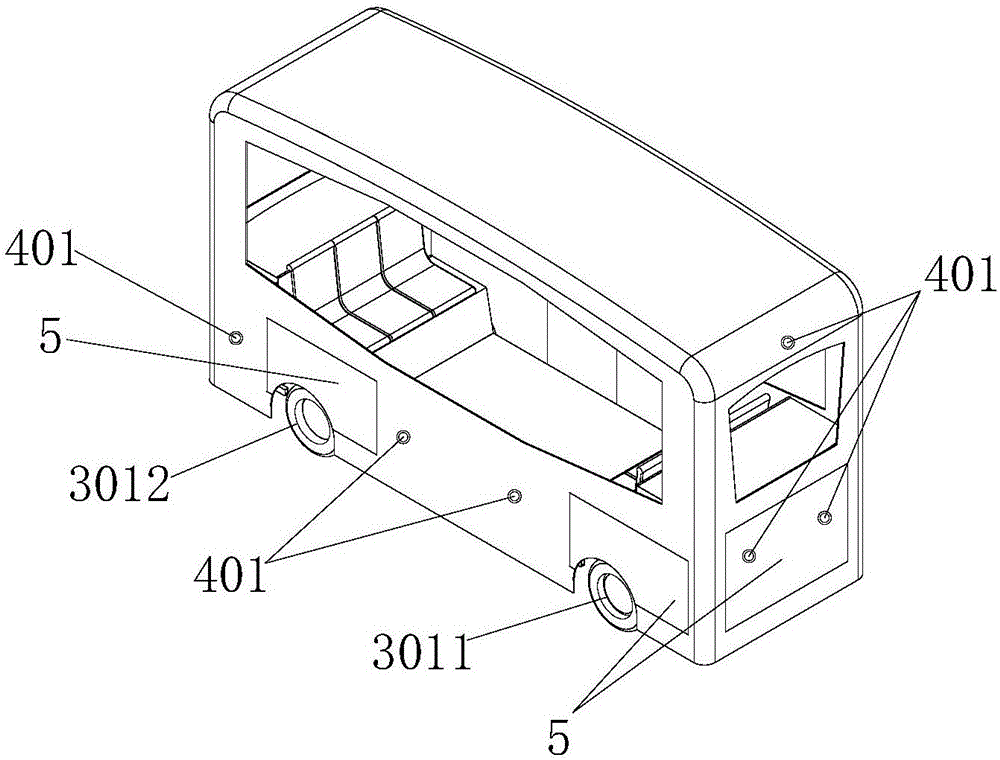
[0026] Embodiment 1 of the present invention: as Figure 1 ~ Figure 4 As shown, the collision avoidance and obstacle avoidance system of this driverless bus includes a vehicle body, a control system 1 and an energy supply device 2 , and also includes an actuator 3 , a detection device 4 and a buffer device 5 . The actuator 3 and the detection device 4 are all connected to the control system 1 for signals, and the control system 1, the actuator 3 and the detection device 4 are also connected to the energy supply device 2. The front end, rear end and both sides of the vehicle body are equipped with buffer devices 5. The buffer device 5 is an anti-collision barrier made of elastic material, which plays a protective role when the vehicle collides. The energy supply device 2 is a storage battery, which supplies energy for the operation of the control system 1 , the actuator 3 and the detection device 4 . The detection device 4 detects the signal of obstacles around the vehicle, an...
Embodiment 2
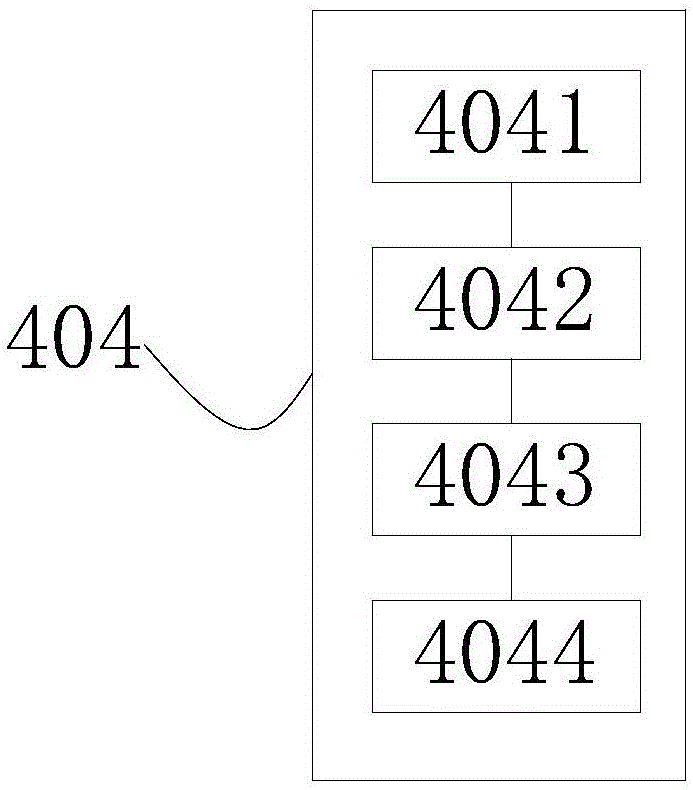
[0028] Embodiment 2: as figure 1 , figure 2 and Figure 4As shown, the collision avoidance and obstacle avoidance system of this driverless bus includes a vehicle body, a control system 1 and an energy supply device 2 , and also includes an actuator 3 , a detection device 4 and a buffer device 5 . The actuator 3 and the detection device 4 are all connected to the control system 1 for signals, and the control system 1, the actuator 3 and the detection device 4 are also connected to the energy supply device 2. The front end, rear end and both sides of the vehicle body are equipped with buffer devices 5. The detection device 4 detects the signal of obstacles around the vehicle, and transmits the data information to the control system 1. The control system 1 analyzes and processes the collected information, obtains the control information, and sends an instruction to the actuator 3. The detection device 4 is composed of nine visual sensors 401 , gyroscope 402 , ultrasonic sens...
Embodiment 3
[0029] Embodiment 3: as Figure 1 ~ Figure 4 As shown, the operation steps of collision avoidance and obstacle avoidance of unmanned buses are as follows:
[0030] F001, the visual sensor 401, the ultrasonic sensor 403 and the radar sensor 404 in the detection device 4 collect the surrounding environment information and the running state of the object to avoid in real time, and measure the instant status information of the vehicle through the gyroscope 402;
[0031] F002, when an obstacle is detected on the road, the collected real-time information is transmitted to the control system 1 for processing and analysis, and an avoidance plan is obtained, and the command is transmitted to the actuator 3:
[0032] 1) If the obstacle on the road ahead is only on one side of the vehicle or the target is small, the control system 1 sends an instruction to the actuator 3, and the actuator 3 completes steering and other operations after receiving the instruction, and the vehicle can move ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More