

Genetic particle filtering algorithm-based underwater target tracking and positioning method
A particle filter algorithm, tracking and positioning technology, applied in the field of target tracking, positioning and navigation, can solve the problems of little improvement in positioning accuracy and ineffective calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
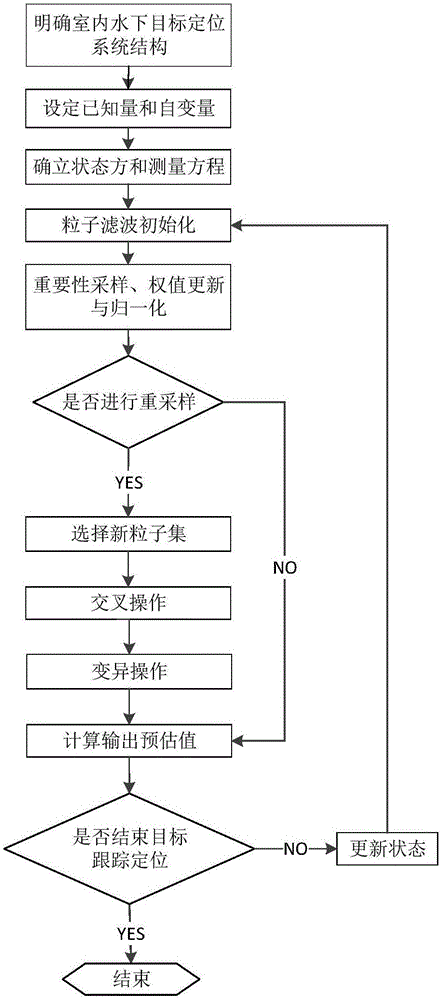
[0045] figure 1 The flowchart for tracking and locating underwater targets based on the genetic particle filter algorithm disclosed by the present invention includes the following steps:
[0046] (1) Deploy the underwater target tracking and positioning system: install m hydrophones in the water area, and install ultrasonic transducers and hydraulic depth gauges on the tracking and positioning targets;
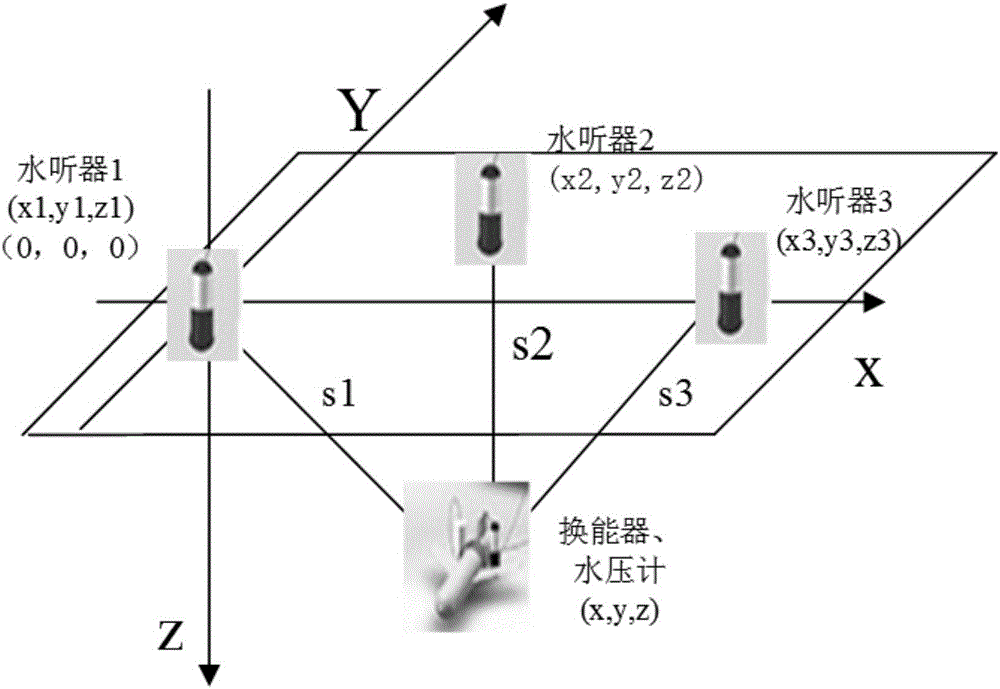
[0047] In this embodiment, three hydrophones are used to distribute in the water area in the form of a triangular array.
[0048] (2) Establish a three-dimensional coordinate system in the water area and obtain the coordinates of the hydrophone (x j ,y j ,z j ), the measurement distance s between the tracking target and m hydrophones j , The depth h of the positioning target, where j∈(1,2,...,m) represents the serial number of the hydropho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More