Three-dimensional point cloud data acquisition device and three-dimensional point cloud data acquisition method by means of two-dimensional laser scanner
A two-dimensional laser and laser scanning technology, used in measuring devices, using re-radiation, instruments, etc., can solve the problem of large volume, no introduction of the coordinate transformation method of laser point cloud data 2D to 3D, and the price of three-dimensional laser scanners is expensive. and other problems, to achieve the effect of synchronous acquisition and positioning, and light size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the embodiments and the accompanying drawings.
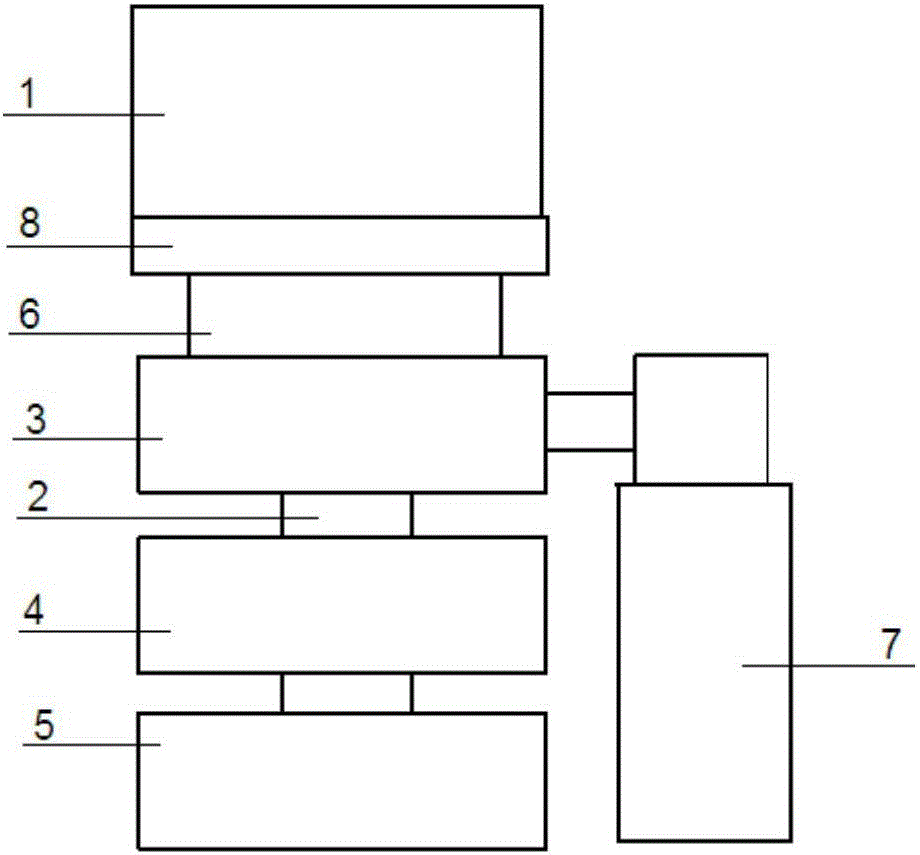
[0041] 1, mechanical principle of the present invention:
[0042] The laser scanner used in this embodiment is the 30LX laser radar of HOKUYO Company, which can realize two-dimensional 270° plane scanning and detect obstacles up to 30m away. The pulsed laser is emitted in all directions in the plane by rotating the mirror and the reflected light is received by the laser receiver. The distance between the obstacle and the radar is measured by calculating the time difference between reflection and reception. In this way, the information of one or more points of the obstacle in the scanning plane is obtained. Using this information, the distance (depth) and width information of obstacles can be obtained, but without knowing the height information, it is impossible to accurately identify obstacles and perceive the three-dimensional environment.
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More