

FastSLAM method based on particle proposal distribution improvement and adaptive particle resampling
A technique of proposed distribution and resampling, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as the inability to guarantee the positive definiteness of the posterior covariance matrix, non-local sampling, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0118] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0119] In this embodiment, it is assumed that the robot adopts a two-dimensional linear velocity motion model and a distance-azimuth measurement model, so the spatial coordinate dimensions of the robot and the landmarks are both 2.
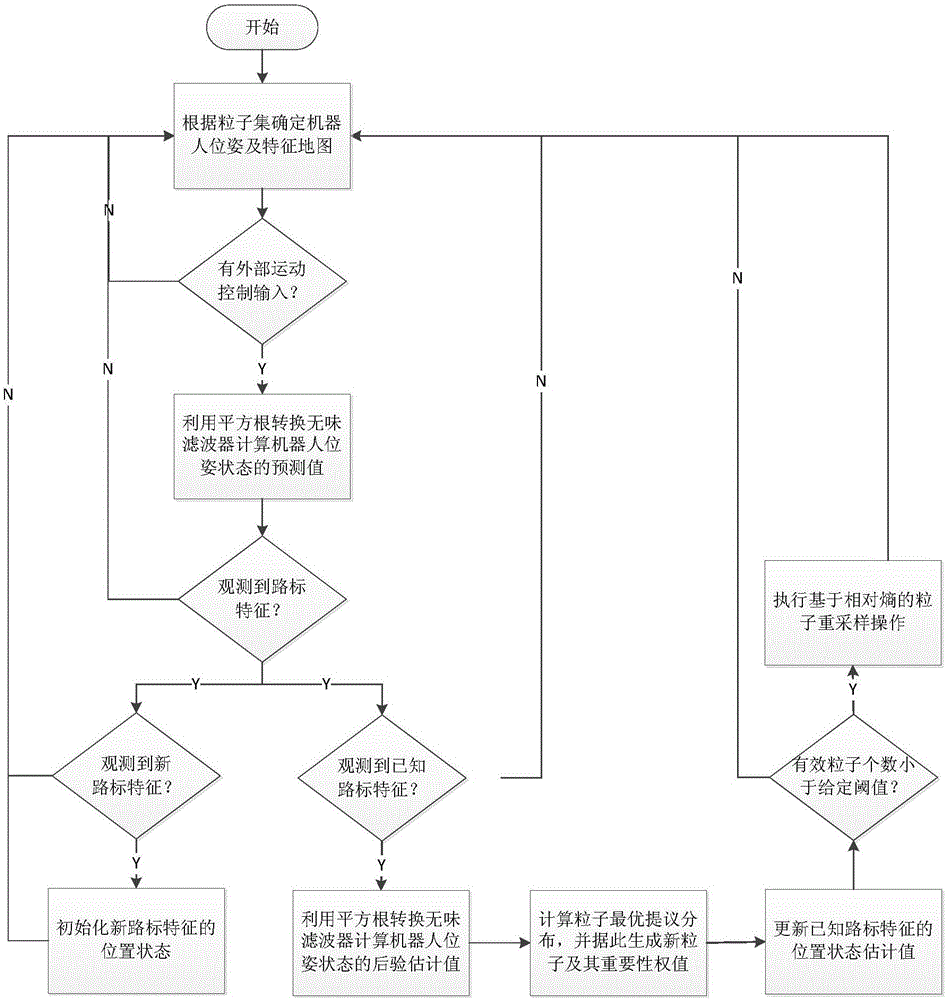
[0120] Such as figure 1 As shown, the present invention is based on the FastSLAM method of improving particle proposal distribution and adaptive particle resampling, comprising the following steps:
[0121] Step 1, express the joint posterior probability of robot pose and landmark feature map at time k as N k A particle set consisting of particles:
[0122]
[0123] Among them, (i) represents the particle number, Indicates the weight of the i-th particle at time k, with respectively represent the estimated value of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More