

Navigation data processing method and system
A technology for navigation data and processing methods, applied in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc., can solve the problems of parameter deviation from actual values, filter degradation, insufficient accuracy, etc. Influence of incomplete information, effect of ensuring tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
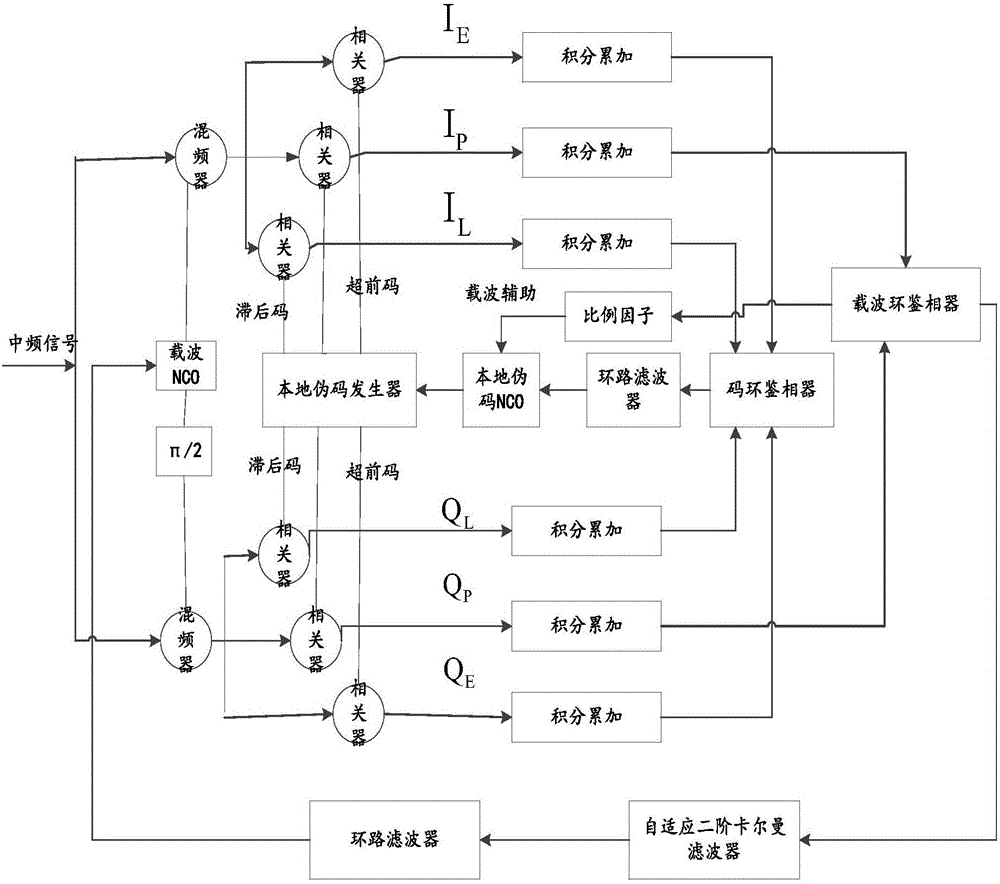
[0140] GPS Pseudocode Tracking Loop in High Dynamic Environment
[0141] The purpose of the code tracking loop is to improve the correlation between the spread spectrum code received by the receiver and the local recurrence code, so as to complete the despreading of the spread spectrum code to obtain accurate navigation and positioning data information. Signal acquisition is to limit the code phase difference between the received satellite signal spreading code and the local reappearance code within the range of ±0.5 chips, and the tracking loop can reduce the code phase difference to the allowable error within range. In addition, in high dynamic scenarios, the Doppler between the receiver and the satellite will affect the code rate of the satellite signal, which causes the code phase and code rate of the satellite signal to be constantly changing, so the code tracking loop needs to monitor the local code The code phase and code rate are constantly adjusted so that the system...
Embodiment 2
[0148] Carrier tracking loop simulation experiment based on adaptive second-order Kalman filter
[0149] The difference between the carrier tracking loop based on the adaptive second-order Kalman filter and the traditional third-order PLL is that the former has an additional adaptive filter before the loop filter. This design can not only increase the stability of the loop but also reduce the The bandwidth of the road improves the estimation accuracy. Therefore, the loop bandwidth of the third-order PLL assisted by the adaptive second-order Kalman filter can be set to 7Hz, because the adaptive second-order Kalman filter can estimate the phase error more accurately in the noise environment, thus The carrier-to-noise ratio of the signal is greatly improved, thereby improving the dynamic adaptability of the PLL. In addition, in order to verify the filtering performance of the adaptive second-order Kalman filter when the prior information is inaccurate, it is assumed that the noi...
Embodiment 3
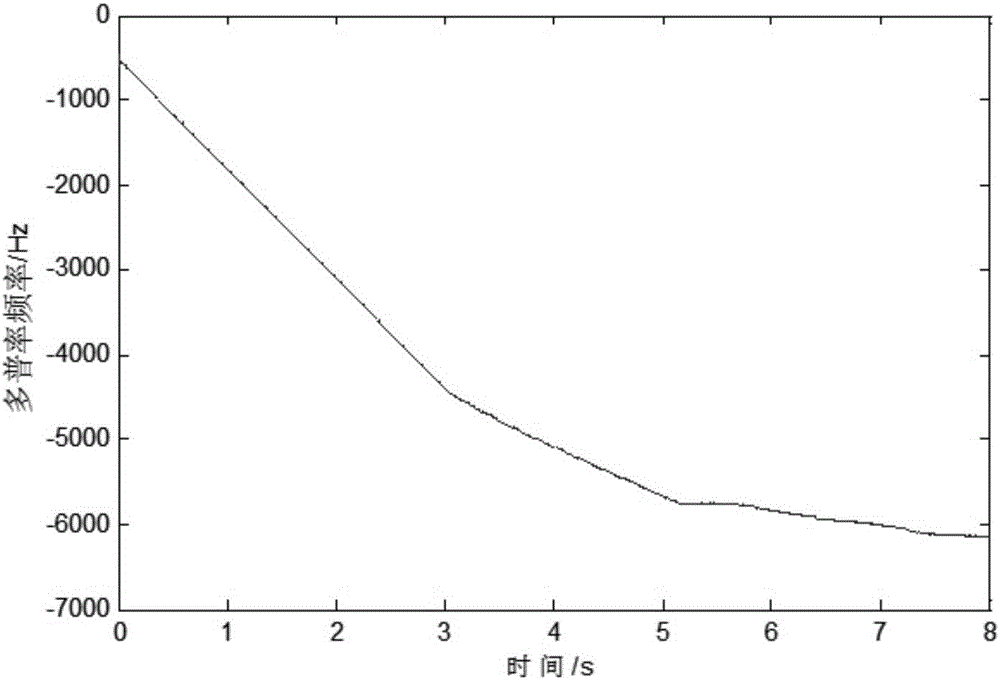
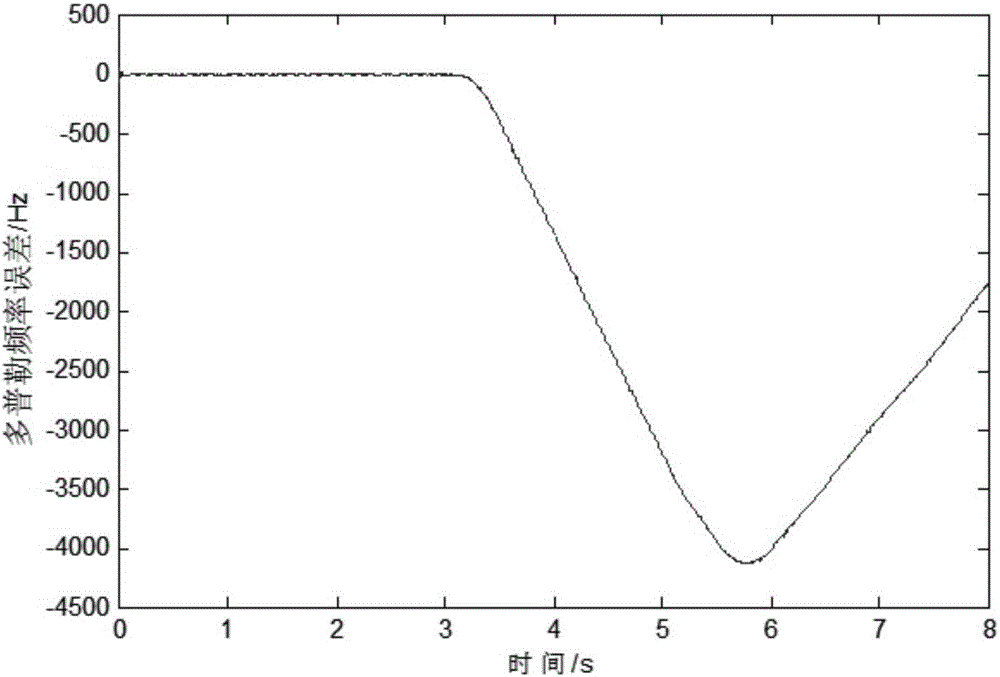
[0152] Simulation of Pseudocode Tracking Loop
[0153] In a high dynamic environment, a large Doppler frequency offset will not only bring errors to the carrier phase delay, but also change the code rate of the C / A code. The Doppler effect is inversely proportional to the wavelength of the signal, and the code rate of C / A is 1.023MHz, which is 1 / 1540 times the carrier frequency. Therefore, the additional Doppler on the base speed of the code is greater than that on the carrier frequency The Doppler is much smaller. Since the tracking accuracy of the carrier loop is much greater than that of the code loop, most of the dynamics can be eliminated by using the carrier loop to assist the code loop, and the loop bandwidth of the code tracking loop can be made very narrow after the carrier is used, so that it can effectively Noise is suppressed, and the loop can also use a low-order loop. This patent uses a second-order loop to prevent the ramp-up of the code phase deviation that ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More